障害者や高齢者、有病者が社会参加するための支援ロボット「TRED WALK」
そしてトリを務めるのは、こちらも早大ロボット研究の重鎮の1人で、2013年3月で終了となったグローバル ロボット アカデミアの拠点リーダーも務めていた、同大学の創造理工学研究科 総合機械工学科および先進理工学研究科 生命理工学専攻に所属する藤江正克教授の研究室のロボットたちだ。医療・福祉ロボット工学を専門とし、超高齢社会における人を包括的にサポートするためのロボットや、外科患者の身体への負担が小さい低侵襲手術を可能とする手術支援ロボットシステムなどを研究開発している。
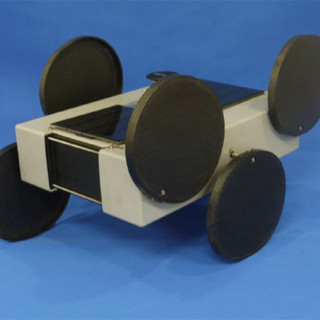
まずは、2004年に研究が始まり、現在も継続中のパーソナルモビリティ「TRED WALK(トレッドウォーク)-1」から紹介しよう(画像32・33)。これは障害者や高齢者、有病者が社会参加するための支援を目的としており、移動支援と介護予防を両立させることを目指している。TRED WALK-1の上にはベルト、いわゆるトレッドミルがあり、スポーツジムのランニングマシンのように歩くことができる。
そして、歩行に障害がある人がちょっとでもその上で歩けば、それを1.5~3倍に増幅してタイヤを回転させ、TRED WALK-1自体が使用者を載せたまま前に進んでくれるというわけだ。ベルトは、スポーツジムのトレッドミルのように一定に動いているのではなく、使用者のペースに合わせて変化する仕組みである。旋回時の転倒なども考慮された1台だ。
なお、画像のTRED WALK-1と同時に、トレッドミル(ベルト)が左右で独立していて、オムニホイール(メカナムホイール)を前後4輪に搭載した旋回性の高い6輪車(中央の通常のタイヤ2輪が駆動輪)の「TRED WALK 2」(画像34)も同時に研究開発中である。

|

|

|
|
画像32(左):障害者や高齢者、有病者の歩行支援を目的としたパーソナルモビリティのTRED WALK-1。画像33(中):TRED WALK-1のトレッドミル部分。使用者の1歩ごとのペースに合わせて回転してくれる。画像34(右):TRED WALK-2。旋回性はこちらの方が上と思われる |
||
TRED WALK以前に開発された歩行訓練・支援用ロボットたち
今回の展示では、藤江研はTRED WALK-1のほかに、障害者や高齢者、有病者向けの歩行訓練・支援用ロボットが3台が展示された。その内の2台は、藤江教授がかつて在籍した日立製作所で開発したもので、1999年製のリハビリテーション用2ベルト歩行訓練機「PW-10」(画像35・36)と、「歩行補助機」(開発年は未確認で、1999年5月23日以前であることは確か)(画像37・38)だ。
PW-10は日立製作所が1996年に販売してきたした高機能型歩行訓練機「PW-1」、1998年の手動介助機構式を採用した普及型歩行訓練機「PW-2」に続く第3段で、サドルの上に座って体重を預けられる形でトレッドミル上での歩行訓練を行えるというものだ。実際に試してみた限り、かなり楽である。
歩行補助機は、「AI自立歩行支援機」という別名があり、新エネルギー・産業技術総合開発機構(NEDO)からの委託研究によって日立製作所時代に藤江教授らが開発を行ったようだ。こちらは体重を預ける形で歩行支援してくれるロボット。それもAIというだけあって、かなりアシスト機能が高いと思われる。

|

|
|
画像35(左):リハビリテーション用2ベルト歩行訓練機のPW-10を実際に試してみたところ。画像36(右):PW-10のコンソールなど |
|

|

|
|
画像37・38:歩行補助機は、AI自立歩行支援機の名前も持つ |
|
また、3台の内の残りの1台は、実はロボットというよりは、TRED WALKシリーズの開発のため、「モータ電流値から推定した蹴り力の精度検証実験」を行うために開発された装置(画像39・40)。TRED WALK-2から駆動輪を除き、歩行面として必要なトレッドミル部のみが使用されている(左右が独立した2本ベルト型のトレッドミル)。床反力計がトレッドミル部分に設置されており、この上を歩くことで、左右の脚で歩き方のリズムが違うことなどを計測できるようになっているのである。

|

|
|
画像39(左):モータ電流値から推定した蹴り力の精度検証実験用。画像40(右):実際に装置を試してみたところ。ちょっとバーが身長に合ってない |
|