2足歩行型ヒューマノイドロボット「WABIANシリーズ」
続いては、WABIANシリーズの旧モデル、2001年開発の「WABIAN-RV」を紹介(画像8・9)。WABIANシリーズは、高西研究室で研究されている2足歩行型ヒューマノイドロボットで、1996年に最初の「WABIAN」が完成した。その後はおよそ1年に1度のペースで改良され、その歴史を簡単に追っていくと、まず翌1997年に多彩な全身運動を可能とした「WABIAN-R」がデビュー。1998年には、視覚情報および床反力を取得可能にした「WABIAN-RII」に改良された。そして1999年には足底が改良されて多様な歩行を可能とした「WABIAN-RIII」となっている。さらに2000年には継続的な人間への追従運動を実現した「WABIAN-RIV」へとバージョンアップし、そして2001年に歩行教示機能を搭載した「WABIAN-RV」へと進化したというわけだ。この後、2002年からは「WABIAN-2」の開発へと移行し、2006年からは現役機のWABIAN-2Rに移行している。WABIAN-RVのスペックは以下の通りだ。
- 全高:189cm(全幅90cm・奥行き57cm)/重量:127.9kg
- 自由度:43(目2×2、首4、体幹3、腕7×2、手3×2、脚6×2)
- 歩行性能:1歩に要する時間が0.96秒、歩幅0.3m
- 歩行タイプ:動歩行

|

|
|
画像8(左)・画像9:現行機「WABIAN-2R」(画像3)の祖先(それとも先輩?)のヒューマノイドロボット「WABIAN-RV」。胸のRVとか見ると、筆者の場合、アニメ「銀河漂流バイファム」の人型兵器の総称ラウンド・バーニアンと間違えてしまう(笑) |
|
人間の顎運動を考慮したユニバーサルデンタルロボット「WY-5RII」
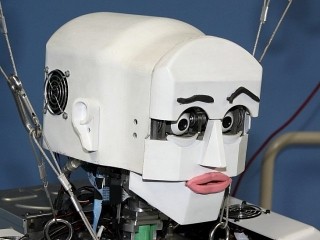
次も高西研究室で開発された1台。見ただけでは何の研究を目的としたロボットかわからないかも知れないが、人間の顎運動を考慮したユニバーサルデンタルロボット、もしくはマウスピースを有した開閉口訓練ロボットの「WY-5RII(Waseda Yamanashi-5 Refined II)」だ(画像10・11)。顎運動障害者用の開閉口訓練を目的としたもので、医師が治療機を操作するマスタ・スレーブ制御方式を採用している。また、当時はまだISDN回線が一般的だったのだが、ISDNの128Kbps回線を使っての遠隔治療も可能だ。
WYシリーズは1995年のWY-1から始まって、2004年の「WY-5RVI」まで12バージョンある(「WY-4」と「WY-5」は1998年に開発)。その中の「WY-5」シリーズは1998年から開発・改良がスタートし、1999年に「WY-5R」、2000年に今回展示されている「WY-5RII」がデビュー。2001年に「WY-5RIII」、2002年に「WY-5RIV」、2003年に「WY-5RV」、2004年に「WY-5RVI」という具合で改良されてきた。なお、WY-5RIIのもう1つの発展型として、2001年には「WY-6」が開発されている。

|

|
|
画像10(左)・画像11:ユニバーサルデンタルロボット兼開閉口訓練ロボットのWY-5RII |
|