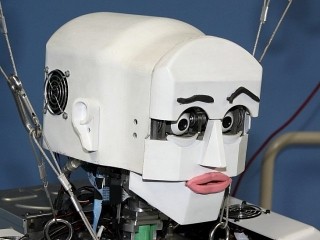
台車型ヒューマノイドロボット「iSHA」
次は、人間とロボットとの自然なコミュニケーションのあり方を研究するためのプラットフォームとして、1999年に開発された台車型ヒューマノイドロボット「iSHA」(画像19・20)。両眼で人やものを追跡したり、音に合わせてダンスをしたり、物音に反応して振り返ったりもする。体を軽く押したり、握手して引っ張ったり、音声や音によっても行動する、生き物のようなロボットの実現を目指して開発されたロボットで、視覚、力覚、聴覚によるコミュニケーションを実現しているのが特徴だ。

|

|
|
画像19(左):台車型ヒューマノイドロボットのiSHA。RTフロンティアの表通りに正面が向けられているため、ガラス越しなのはご了承いただきたい。画像20:顔のアップ。現代のロボットと比較するとシンプルだが、なんとなくユーモラスな感じがする |
|
パッシブRFIDを用いたパーソナルモビリティ(自律移動ロボット)「UBIRO(ユビロ)」
橋本研からのロボットの最後は、2007年に発表されたパッシブRFIDを用いたパーソナルモビリティ(自律移動ロボット)の「UBIRO(ユビロ)」(画像21)。環境中に埋め込まれているRFIDの位置情報からロボットの自己位置と姿勢を推定する仕組みだ。なお、銀座などでは街中にさまざまなセンサを埋め込んで、街自体をロボット化してしまうユビキタス系の実験が今でも継続中である。この方式は確実性は確かなのだが、どうしてもコストがかかってしまうのが難点だ。
UBIROの開発から約6年が経ち、どちらかというと現在のパーソナルモビリティの開発の方向性としては、GPSと首振りを機構を搭載したレーザーレンジファインダによる周囲の環境の3次元認識による自己位置推定が進められており、街のロボット化は将来的なものとして、単体で自律走向を実現しようという流れのようである。

|
|
画像21。UBIRO。確認はできなかったが、その名前はUBIQUITOUSとROBOTを合わせたものではないかと推測される |