人の表情の再現によりコミュニケーションの研究を目指した「WD-2」
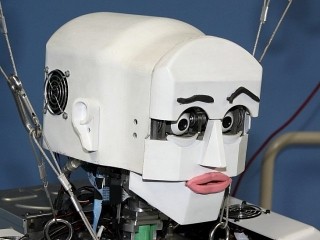
そして、アイちゃん同様に、人の表情の再現によりコミュニケーションについて研究するべく2005年に開発されたのが、投影面形状変形顔型ロボット「WD-2(Waseda-Docomo fece robot No.2)」だ(画像12・13)。DocomoとはもちろんNTTドコモのことで、共同研究として行われた。
WD-2はどんなロボットかというと、ちょっと破損してしまっているが、顔の形をしている白いフェイスマスクが軟らかい素材のセプトンでできており、このマスク上の目、鼻、輪郭など顔の特徴を表す「特徴点」を、顔内部駆動機構(3軸駆動ユニット)、輪郭駆動機構により全56自由度で3次元方向に任意の量だけ駆動し、このマスクに顔の映像を投影して、その上でさまざまな顔形状(個人の顔の特徴)および表情を表現するというものだ。
特徴点は顔の内部に17点、輪郭に10点あり、顔内部の特徴点は3自由度または2自由度、輪郭は顔の大きさを変えるために1自由度で駆動するようになっている。具体的には、額2、眉毛3×2、目7×2、鼻8、唇8、顎2、頬6、輪郭10だ。

|

|
|
画像12(左)・画像13:投影面形状変形顔型ロボット・WD-2。デスマスクっぽくて、テーマパークのホラー系アトラクションでも活躍できそうである |
|
手術手技定量評価システム「WKS-2RII」
それから、ちょっとロボットというイメージではないのだが、RTテクノロジーが応用された、手術手技定量評価システム「WKS-2RII(Waseda Kyotokagaku Skin No.2 Refined II)」も高西研の開発したロボットの1つだ(画像14)。センサを埋め込まれた模擬皮膚部、Webカメラ、PCという構成で、2008年に京都科学との共同開発により完成し、すでに製品化されている。センサを備えた模擬皮膚を縫合することで、手術手技を定量的に評価できるトレーニングツールというわけだ。
医療の現場でのミスを防ぐには訓練が必要だが、縫合などの技術は実際に人を相手に訓練するわけにはいかないため、さまざまなシミュレータが開発されているが、その多くが情報のフィードバックがないために教育効果があまりなく、そうした現状を解決するべく高西研で研究が2005年からスタート。最初に「WKS-1」が開発され、2007年に完成形に近い「WKS-2R」が完成し、インタフェースと評価関数を変更したのが「WKS-2RII」なのである。高西研は、ほかにも「ロボティック気道管理シミュレータ」(画像15)などのように、医療技術を向上させるためのシミュレータ・ロボットも複数開発しているのだ記事はこちら。

|

|
|
画像14(左):手術手技定量評価システム・WKS-2RII。画像15(右):ロボティック気道管理シミュレータ。どちらも高西研と京都科学(学校の理科室の人体模型などを手がける企業)のコラボレーションから生まれたロボットたちだ |
|
2輪倒立振子ロボット「WV-1」
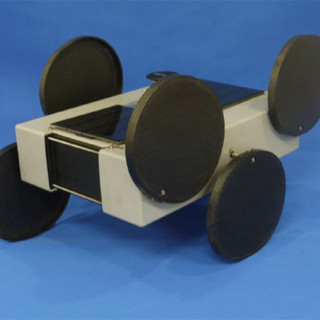
高西研の最後の1つは、2輪倒立振子ロボット「WV-1(Waseda Vehicle No.1)」(画像16)。高西研では倒立振子を教材として幅広い年代の多様な学習用途に対応できるよう研究開発を行っており、そこで生まれてきたのがWV-1というわけだ。なお、これはJAPAN ROBOTECHから2輪倒立振子知能ロボット「ミニウェイ」として発売中である。

|
|
画像16。2輪倒立振子ロボットWV-1 |