世界で初めて生卵をきれいに割って見せた「WENDY」
続いては研究室が変わって、理工学術院 創造理工学部 総合機械工学科の菅野重樹 教授の研究室のロボットだ。ちなみに、菅野教授は、つくば万博で鍵盤楽器を演奏した「WABOT-2」(画像22)の研究で工学博士となった人物で(1991年にはその発展型のピアノ演奏ロボット「WABOT-2mkII」を開発している)、現在は福祉・介護用として研究開発されている人間共存ロボット「TWENDY-ONE」(画像23)の生みの親として知られる(TWENDY-ONEについては、研究室ツアーのレポートを参照していただければと思う。また、 その歴史については、高西研のWEシリーズを解説したWebサイトを参照していただければと思う)。

|

|
|
画像22(左):つくば万博で鍵盤楽器を弾いてみせたWABOT-2。現在は、早大の西早稲田キャンパス63号館で静態展示中(画像提供:早稲田大学)。画像23(右):TWENDY-ONE。身長1467mm、肩幅734mm、全重量111kgとかなり大型。研究ツアー時は修理中だった |
|
まずはそのTWENDY-ONEの前身である、1999年に開発された「WENDY(Waseda ENgineering Designed sYmbiont)」から紹介しよう(画像24・25)。人と衝突してもその衝撃を抑えた上で、人間の動きに追従することができたり、人間の指先の形状を模した指を左右4本ずつ備えていたりすることが特徴だ。しかもその指はとても器用で、世界で初めて生卵をきれいに割って見せたのがWENDYなのである(画像26・27)。

|

|
|
画像24(左):人間共存ロボット・WENDY。現在はカバーがないためゴツイが、受動的な柔軟性関節を搭載しており、クッション性が高い。画像25(右):静態展示ではフレームがむき出しだが、かつては肩部や腕部にカバーがはめられていた(公式Webサイトより抜粋) |
|

|

|
|
画像26(左):WENDYの指先。現在は当時の指先ではないようだ。画像27:前年の1998年にWENDYに搭載されるのと同型のロボットハンドが実現した卵割りの様子 |
|
生物の基本的な行動原則「自己保存の法則」が導入された「WAMOEBA-2Ri」
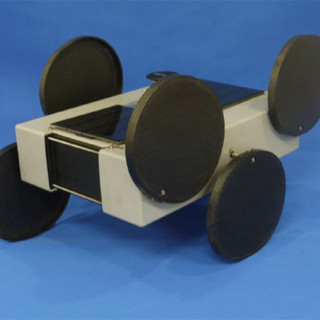
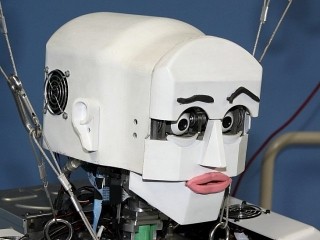
次は、情緒交流ロボット「WAMOEBA(Waseda Artificial Mind On Emotion BASE:ワメーバ)」シリーズの「WAMOEBA-2Ri」だ(画像28・29)。同シリーズは、ロボット自身の身体に即した情動表出の創発を期待して、生物の基本的な行動原則である「自己保存の法則」が導入されたロボットで、1990年から研究がスタート。

|

|
|
画像28(左)・画像29:情緒交流ロボットのWAMOEBA-2Ri。何とも面白いネーミングである |
|
「WAMOEBA-2」シリーズは1998年から研究がスタートし、最大の特徴は、情動表現を行うために全4種類の「ホルモンパラメータ」が定義されたこと。「R-エンドルフィン」、「R-アドレナリン」、「R-ノルアドレナリン」、「R-ドーパミン」のそれぞれの量に従って、各部の自由度の制御パラメータが変化し、例えばR-エンドルフィンが多いと発話時のピッチが高くなり、R-アドレナリンが分泌された場合は放熱ファンの回転数が上昇したりするといった仕組みだったのである。
最初の「WAMOEBA-1」は、当時移動ロボットに利用されることの少なかったニューラルネット(神経回路モデル)が導入されていることが特徴。改良型の「WAMOEBA-1R」は赤外線センサが搭載され、さらに頭部にある色による感情表現機能の改良が行われた。そして1995年になって誕生したのが、「WAMOEBA-2」だ。人間とインタラクションを行うことを目的に開発された。
フィールド実験の結果から、特にアームによる接触と視線の提示が、被験者の心理に与える影響が大きいことが明らかになったことから、それらの機能を追加したのが「WAMOEBA-2R」およびWAMOEBA-2Riというわけだ。なお、末尾の「i」は「eye」の略称である。その後、2002年にはWAMOEBA-2シリーズをさらに改良した「WAMOEBA-3」が登場し、2009年まで研究が続けられたのである。
現在も研究が続けられている森林作業支援ロボット「WOODY」
そして菅野研のラストは、2003年に登場し、現在も研究が続けられている森林作業支援ロボット「WOODY」だ(画像30・31)。日本の森林を守り、林業の安全性と生産性の向上を目指して森林内作業を支援するメカトロニクスの研究から生まれたロボットで、枝をよけ、曲木にも登れ、高所において枝打ちなどの作業を行うことが可能だ。昇降と回転機構を備えた本体と、作業を行う取り替えパーツに分かれているのが特徴となっている。

|

|
|
画像30(左):WOODYの表側(?)。WODDY-1と書かれているが、公式サイトなどの資料では名称はWOODYとなっている。将来、改良・進化型の「WOODY-2」が登場するのだろう。画像31(右):枝にしがみつく機構 |
|