Walky~二足歩行ロボットをiPhoneで操ろう
二足歩行ロボットの操作は今でもラジコンカーと同じようなコントローラを使うことが多い。なにか直観的に操作できる方法はないものか。
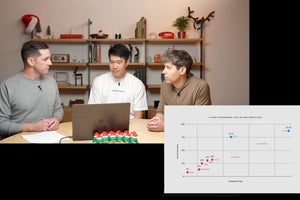
こうした要望に対し、慶應義塾大学大学院メディアデザイン研究科(KMD)とJST ERATO 五十嵐デザインインタフェースプロジェクトが提案するのがiPhoneのマルチタッチインタフェースを活用しての操作系「Walky」だ。
WalkyインタフェースはiPhoneアプリとして実装されており、二本の指をロボットの脚に見立てたジェスチャー入力をiPhoneに行うことでロボットの移動操作やアクション発動ができるようになっている。
例えば指を歩くように動かせば二足歩行を行い、一本の指を固定して片方の指を横に動かせばそちらにスライド移動を行う。両指でダブルクリックのような動作をすれば垂直ジャンプをするし、指で蹴る動作をすればちゃんとそっちの脚で蹴ってくれる。
二足歩行ロボットを使ったサッカーなどは人気のロボット競技だが、このインタフェースならば初心者にも馴染みやすいかも知れない。
脚はいいとして、腕や手はどうするのか……もう1台のiPhoneを使って両腕の指でやるのか? という意地悪な突っ込みも来そうだが、今回の展示は一番手頃なデバイスとしてiPhoneを選択したに過ぎない。この操作方式の可能性が見出されればiPhoneアプリという形でなく、二足歩行ロボット操作専用のタッチパッドコントローラーなども開発されるはずで、研究グループとしては、そうしたものを最終目標に置いているのだろう。あるいはもっと現実的に、マルチタッチに対応したWindows7ベースのタブレットPCを用いる手もある。
実際の操作デモについては動画が公開されているので興味がある人はそちらを見ていただきたい。

|

|
|
二足歩行ロボットの操作インタフェースとしての新流となるのか? |
|

|

|
|
ガンダムみたいな巨大なロボットヒーローを主人公の少年が両腕の指を小刻みに動かして操作する姿はあまり想像したくはないが、現実世界の初心者向けロボット操縦インタフェースとしては面白いかも知れない |
|