生物的な柔らかい自立歩行ロボット
続いては、橋本周司教授の研究室のロボット。「自立歩行ゲル(ケミカル)ロボット」(画像21・22)をはじめとする、ゲルロボット関連を紹介しよう。これは分子ロボティクスの範疇に含まれるような、ゲル状の物体が動作するというもので、世界的に複数の研究者がこれまでも研究を行い発表しているのだが、早大のロボットは一般的にロボットらしいイメージの機械システムのものが大多数だが、こうしたマテリアル系は珍しいタイプなので取り上げておく。
そもそもこのようなロボットの研究を始めた理由というのが、実はWAMOEBA-4と通用するものがあるのだが、自己複製や自律駆動といった生物特有の機能を持つロボットを実現させるためには従来のロボットでは非常に困難であると考えられたからだという。研究室のケミカルロボティクス班が担当しているのだが、ほかにも「生体環境下で駆動する新規自励振動型高分子」、「自励振動ゲルアクチュエータ」、「高分子ゲルの接着制御」、「誘電エラストマーアクチュエータの開発」など、生物的な柔らかいロボットやそれに連なる技術が研究されている。
そして自立歩行ゲルロボットは、自然の自己組織化を参考にした3次元自己組み立て法や、化学反応を利用して運動エネルギーを得る仕組みの研究から生まれたもので、「振動化学反応」を高分子ゲルと組み合わせることで周期的な膨潤・収縮運動を生成させ、さらに高分子ゲルの網目に異方性や「ミクロ相分離構造」を導入することで、自ら歩くゲルや蠕動(ぜんどう)運動を実現させたものである。研究内容を詳細に紹介しているこちらのWebサイトで尺取り虫的に前進していく様子が動画で見られるので、その動きを見てみてほしい。
ちなみに橋本研究室では、ほかにも「群ロボットによる運動制御」とか「エネルギー自給型水中ロボット」など、興味深いコンセプトのロボットが多数研究されている。

|

|
|
画像22(左)・画像23(右):自立歩行ゲルロボット。左右で、600マイクロメートルほど移動している。前述したサイトでは、この動画を見られる |
|
クラウド経由で遠隔操作が可能な環境モニタリングロボ
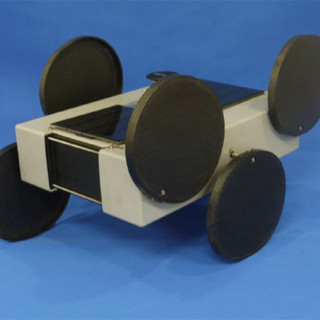
次は、早大のロボットの中でも最新の1台である、藤江教授と共に60年代から早大でロボット研究を続けている1人、高西淳夫教授の研究室とJAPAN ROBOTECHにより共同開発された車両型の「自立移動型環境モニタリングロボット」の実機だ(画像22)。これまでにも紹介している。スマートフォン・クラウドサービスを利用して遠隔操作も可能で、空中放射線量やPM2.5などの有害物質の調査などを目的としており、2013年8月に発表された。今回のRTフロンティアに展示されたロボットの中でも最新の1台である。

|
|
画像24。自立移動型環境モニタリングロボット |
同ロボットは6つの楕円型車輪が採用されており、凹凸の激しい山林などでも最大18cm程度の起伏も乗り越えることが可能だ。スマートフォンや各種センサを使用して写真やデータなどを収集する仕組みである。また、3G回線・LTE通信対応地域であれば、日本にいながら海外での操作できるほか(記者会見では、逆にドイツから操作してみせた)、クラウドサービスを使用して収集データを複数のユーザーが活用するといったことも可能だ。
取材した際はRTフロンティア内の平らな床面のため、かなり動きづらそうに見えてしまったのだが(しかもガッタンガッタンかなり床に打ち付ける音が響く)、不整地踏破能力を優先しているためで、屋外での実験の様子は公式動画で見ることができる。
|
自立移動型環境モニタリングロボットが不整地を移動する様子 |
というわけで、まずは「グローバルロボットアカデミア シンポジウム・卓越成果報告会」の概要報告と、その一部として行われた研究室+RTフロンティア見学ツアーのロボットたちのレポートを行った。いかがだっただろうか。1960年代から日本のロボット研究と開発に携わってきた藤江教授や、AR研究の第一人者である稲見教授らの個別の講演内容は、また追って別個にお届けするのでお待ちいただきたい。