またRTフロンティアに関しては、こちらも昨年に同大学のオープンキャンパス時にレポートしているので、その時に紹介した展示されている過去の同じロボットたちと、昨年の研究室ツアーで紹介したロボットたちは割愛させていただく。
「自己保存の法則」を導入した情緒交流ロボット
今回のRTフロンティアでの目玉ロボットの紹介は、実機そのものは見られなかった(というかあまりにも先進的過ぎて要素的な研究が行われている段階なので、まだ実機はない)のだが、筆者個人として一番のヒットだったのが、菅野教授の研究室における最新ロボットの1台となる、「自己保存の法則」が導入されている情緒交流ロボット「WAMOEBA(Waseda Artificial Mind On Emotion BASE:早稲田のアメーバ)」シリーズの最新型「WAMOEBA-4」(のコンセプト)だろう。
WAMOEBAプロジェクトは、「ロボットに心は芽生えるか」という壮大なテーマを扱っており、それに対するアプローチとして生物の基本的な行動原則である自己保存の仕組みを有することを目標に開発されている。昨年のオープンキャンパス時のRTフロンティアレポートでは、WAMOEBAシリーズの内、同施設に静態展示されている「WAMOEBA-2Ri」(WAMOEBA-2シリーズは1995~2001年まで研究が行われた)の実機を紹介したが、今回のWAMOEBA-4は、間に2002~2009年にかけて研究されたWAMOEBA-3を挟み、2012年から研究がスタートして現在も継続中の最新モデルとなる。
ちなみに、WAMOEBA-1(画像12)は1990~1994年にかけて研究が行われ、ロボットが自己保存に基づいて行動選択と学習を行った際に、観測者(ヒト)が感情移入できる行動を生成できるかどうかの検証が行われた。WAMOEBA-1の脳の情報処理回路は、画像13の通りである。

|

|
|
画像12(左):WAMOEBA-1の改良型のWAMOEBA-1R。赤外線センサが搭載され、頭部の色による感情表現機能が改良された(画像は早大のRTPediaのもの)。画像13(右):その際の情報処理回路 |
|
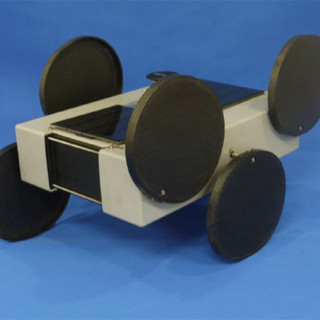
そしてWAMOEBA-2シリーズは、観測者であるヒトがロボットと同じ空間に入り、インタラクションを行うことを目的として開発された。WAMOEBA-2(画像14)を改良したのが、静態展示されているWAMOEBA-2Ri(画像15)である。そして画像16は、WAMOEBA-2に搭載された計算式で、「自己保存評価関数(各センサの絶対値からの入力から算出)」など。3番目の式にある4つの「ホルモンパラメータ」というのが面白い。

|

|

|
|
画像14(左):WAMOEBA-2(画像は早大のRTPediaのもの)。画像15(中):改良型のWAMOEBA-2Ri。iはeyeを意味する。画像16(右):WAMOEBA-2シリーズに組み込まれた計算式 |
||
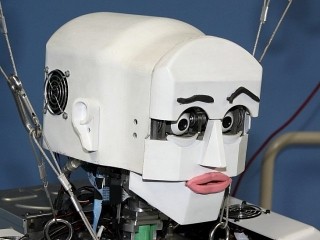
そしてその次に開発されたWAMOEBA-3(画像17)は、評価関数にヒトの主観的評価を用いることで、ヒトがロボットのコミュニケーションを長期間持続可能にしたというものだった。詳細な説明は、RTPediaで行われているので、「研究事例」の中の菅野研究室の「WAMOEBA」を開き、「研究の歴史」の中から「WAMOEBA-3」をクリックしてほしい。

|
|
画像17。WAMOEBA-3(画像は早大のRTPediaのもの) |
なお、これまでのWAMOEBAシリーズでは、ヒトや動物の機能(機序)を模倣してきたのだが、生体と機械では材料を初めとして根本的に異なっているため、ソフトウェアの部分(脳や自律神経など)を模倣しただけでは限界があるのではないかという疑問点が、WAMOEBA-4の研究を始める際のポイントとなったという。これまでのソフトウェアからハードウェアへと研究の流れを大きく変え、脳や自律神経系の模倣から循環器系や細胞の機能の模倣という、新たな流れの基に研究が行われているのが、WAMOEBA-4なのである(画像18)。これまで、ハードからソフトへと進んできたわけだが、ここでまたより深いレベルでソフトからハードへと戻ろうというわけだ。
つまりどういうことかというと、当然だがロボットの身体はヒトとは材質から作りからまったく異なるので(もちろん似せて作られている部分はあるが)、そこにヒトの心理モデルを導入しても意味がないということ。要は、ロボットの身体にマッチした心理モデルを使うことで初めて、ロボットの心が生まれるのではないか、という考えの研究なのである。また、すべての生物には自己保存の本能があるわけで、ロボットの心を実現するためには、ハードウェアにおける「自己保存」が重要だろうともいう。

|
|
画像18。ソフトウェアからハードウェアへという新しい考えで研究されているのがWAMOEBA-4である |
ロボットの活動を妨げる要因としては、大きく、「損傷」、「メンテナンス不足」、「エネルギーの欠乏」がある(画像19)。またそれぞれを見ていくと、損傷としては、断線、センサの破壊、関節などの摺動(しょうどう)部の摩耗など。メンテナンス不足としては、潤滑(油などの)不足、バッテリーの寿命、摺動部のガタつきなどが挙げられるだろう。そしてエネルギーの欠乏は、電源のない場所においては充電できないのはいうまでもない。
それらに対して必要とされるのが、損傷には「自己修復機能」、メンテナンス不足には「自己機能維持」、エネルギーの欠乏には「自立的なエネルギーシステム」という具合だ(画像20)。この3要素を「自己保存機能」として研究室では定義しており、ヒトが介入しなくても活動し続けることが可能なロボットを目指しているのである。

|

|
|
画像19(左):ロボットの活動を妨げる3大要因。画像20(右):活動を妨害する3大要因に対する仕組み |
|
そしてその自己保存機能3要素を実現するため、それぞれ以下の機能を備えたロボットの研究開発を行っているという。自己修復機能では、断線から修復する導線、破壊から修復するセンサ、摩耗や破壊から修復するアクチュエータ、破壊から修復する構造部材などだ。自己機能維持では、潤滑油の供給を自動で行う自己機能維持など。そして自立的なエネルギーシステムでは、バイオリアクター(エネルギー変換装置)や燃料電池というわけだ。
もう少し具体的に説明すると、WAMOEBA-4が目指しているのは、有機物(エネルギー源)、オイル(潤滑油供給)、修復材(自己修復)のための物質をロボットが自分で摂取し、人工循環器系を用いて標的カ所に分配することで、自信で活動し続けるようにするというのである。
どうだろう? これが実際に形になったら、どら焼きをはじめとするヒトと同じ食事をしてエネルギー源とし、ちょっとやそっとケガしても自己修復が可能な22世紀からやって来たネコ型ロボットですら実現しそうではないか!? まぁ、その某ロボットは風邪すらひいてしまうほどなので、もはやロボットというよりは、人工生命体といった方が正しいなのかも知れないが…。
もちろん、現状で、人間の胃腸のような消化器を人工的に作るのは相当難しい話で、実現するとしてもかなり先の話になるのは間違いのない話である。それでも、人工循環器系、リアクター、自己修復する導線、潤滑要カプセル、食物粉砕ロボット(装置)など、部分的な要素のプロトタイプ的なものは作られている(画像20)。今後は、これらをどう高性能化し、同時にロボットの本体内にうまく組み込めるように小型化を実現できるか、といったところがポイントというわけだ。
筆者も、さすがにWAMOEBA-3から一足飛び過ぎて、もっと段階を踏んだ先の、WAMOEBA-10ぐらいの目標なのでは? と度肝を抜かれたのが正直な感想だが、この挑戦的というか野心的というか、世界でも同じような研究はあまりないというほど過激ともいえる研究の成果が実ることを期待したい。

|
|
画像21。WAMOEBA-4の人工循環器系を実現するために複数の実験が行われている |