クローラと牽引アームのハイブリッドロボット「モビリティ」
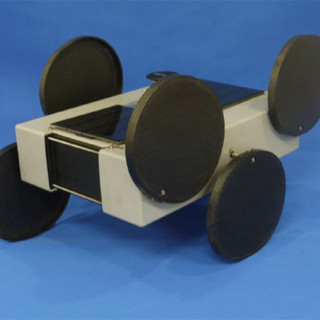
そして林業ロボットの3台目は、林地内走破用の「モビリティ」だ(これも、いずれは日本風の正式名称がつけられると思われる)。筆者もこれまでさまざまなロボットを拝見してきたが、これまで見たことのないハイブリッド型で、クローラ(左右計6つ、それぞれスパイクのあるなしや、位置・サイズが異なる)に加え、滑らないように地面に固定し、その後に本体を引き上げる(引き寄せる)ための2本の牽引アームが備えられているのが大きな特徴だ(画像29~31)。
ロボットにとって非常に移動が難しい環境として、最近で最も有名になった場所といえば、水素爆発を起こした福島第一原子力発電所のガレキの散乱する建屋内(ガレキがなくても、グレーチングや急傾斜の金属製階段など、クローラ機構であっても非常にロボットには移動が困難)やとげとげした砂であるレゴリスに被われた月面(やそれに近い砂漠)などだろうが、これまた難しさの種類が違うとはいえ、ある意味それら以上に難しいのが実は(日本の)山林での移動である。
まず屋外であるため、しかも山林なので落ち葉が降り積もった非常にスリップしやすい環境であり、そこへ持ってきて山岳地帯なので当然ながら急傾斜だ。クローラにスパイクを付けても空転して進めない時もあり、そこで2本のアームが落ち葉の下の地面を突き刺して固定し、引き上げるというわけである。人間も傾斜がきつくて滑るような地面を上る時は、四つん這いになってしまった方が確実性は上がるわけで、イメージとしてはそうした感じだ(動画6~8)。
| 動画 |
![]()
|
![]()
|
![]() |
動画6。モビリティがクローラのみで移動する様子
|
|
![]() |
動画7。牽引アームも使ったモビリティの移動の様子
|
|
| 動画 |
![]() |
![]() |
動画8。モビリティが実際に山林で移動している様子(セミナーで上映された動画を撮影)
|
|
ちなみに日本の山林では、林道と作業道を併せても、1ha当たりに16mぐらいしかないそうで(オーストラリアだと50m、ドイツでは100m)、要は道が途切れた先まで行って伐採作業をしているのが日本の林業だそうである。そうした完全な不整地を走破できるモビリティの基礎研究も白井准教授らは行っており、当初、天竜を載せて走れるモビリティを研究していたそうだが、山林を走破できるモビリティはそれだけでも必要性があることから、独立させてモビリティはモビリティで研究をするようになったそうである。ちなみに、プロトタイプ1号機はもう少し小型だったそうで、今回のはプロトタイプ2号機ということである。