1300年の伝統を有する「三紐伐り」を採用した伐倒マニピュレータ「天竜」
続いては、伐倒マニピュレータ「天竜」(画像25~27)。白井准教授のチームは、静岡県の天竜川流域の山林において林業従事者の協力を得て、実際にロボットの実証試験を行っているそうだが、この天竜はその天竜川にちなんでいる。「エンドミル」(画像28)といわれる、ドリル(スーパーロボットもののアニメなどでお馴染みの円錐形ではなく、棒状のもの)と見た目は似ているが、ドリルと同様に軸方向に穴を開けられるだけではなく、軸とは垂直方向に切削していくこともできる工具を用いるロボットで、こちらも立木を伐るのに使われる(動画4・5)。

|

|
|
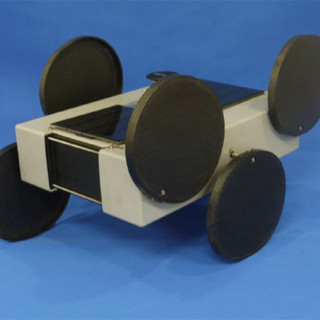
画像25(左):伐倒マニピュレータの天竜。画像26(右):天竜を反対側から見たところ |
|

|

|
|
画像27(左):天竜のプロトタイプI号とII号のイメージCG。画像28:エンドミル。ドリルのように穴を開けたり、チェーンソーのように軸とは垂直方向に切削したりすることも可能 |
|
| 動画 | |||||
|---|---|---|---|---|---|
|
|
|
||||
|
|
||||
ちなみに立木を伐る機器としてはチェーンソーのほかに、大型重機のハーベスタ、伐採機のフェラーバンチャなどがあるが、実際に日本の山林で使われているのは、チェーンソーとハーベスタになるという。これまでは総チェーンの機器(フェラーバンチャも総チェーン)が立木を切り倒すための機器であったが、そこに新しい可能性を示すべく開発されたのが天竜なのである。こちらも今回持ち込まれたものが最新のプロトタイプIII号機だ。ちなみに、エンドミルで山林の立木を伐るような機構の機器は、おそらく天竜しかないだろうということである。
天竜に採用している切り方は、伊勢神宮のご神木の伐倒に用いられている1300年の伝統を有する「三紐伐り」だ。安定性が高い(つまり危険性が低い)ため、今でも儀式で使われているのである。なお、アームがどのような角度にあっても、必ずエンドミルまで動力が伝わる仕組みになっている。ただし、エンドミルの形状には関してはかなり苦労しているということで、刃数だけでも2枚から4枚までいろいろと変えて試しているという。
そしてその動力源だが、ガソリンエンジンが採用された(巽も同様)。一般的にロボットというと、リチウムポリマーなどのバッテリを利用していることが強いが、山中ではそれだと充電切れになった際に再充電が難しいこと、出力的な面からも、ガソリンを追加するだけで済むようにガソリンエンジンとなったのである(山奥なのであまり騒音を気にせずに済むというのもあるはず)。