なぜ、林業にロボットが必要なのか?
3台が紹介された後、なぜ林業用ロボットが必要かということが語られた。まず、現在の日本の山林がどういう状況かというと、特に人工林に関しては非常によくない状態にあるという。日本は3800万haの国土面積を持ち、その内の65%以上の2500万haを森林面積が占め、さらにその内訳として4割の1000万haを杉、檜、松といった人工林が占めている(画像32)。これらの人工林は当然手入れ、つまりある程度立木を伐採する必要があるのだが、人手不足から手入れが行き届いていない人工林が非常に多く、緊急に手を打たないと山地災害が発生するのは目に見えているという。

|
|
画像32。右上が、国土に対する森林の、そして森林の内で人工林が占める割合などをまとめたグラフ。左下は事故死者の数 |
また政策でも木材受給率を現在の20%から50%に上げるとしているが、これは現在の伐木量の約1800万立方m(業界的に立方mは「りゅうべえ」と読む)を、いきなり4000~5000万立方mに急増させることを意味するという。しかし、前述したように林業従事者は5万人しかおらず、海外の平地の森林と比べて日本は山林であることもあって生産性が低く、とても目標を達成できそうにないというわけだ。
また木材儒教率を上げるための林業機械に関してだが、チェーンソーや集材機、自走式搬器(ラジキャリ)、リンナイ作業者、ウィンチなど導入されて比較的歴史のある従来型林業機械に加え、1991年に農水省が公表した高性能林業機械か促進基本方針に掲げられた、多機能を有する作業性能の高い海外製の伐出用機械および育林用機械として「高性能(先進)林業機械」があり、その中に先ほどのハーベスタやフェラーバンチャが含まれる。そのほか、プロセッサ、フォワーダ、タワーヤーダ、スイングヤーダ、スキッダなどがあるが(画像33)、これらはみな重機で、それだけに価格も数千万円と高額だ(補助金で購入しているという)。

|
|
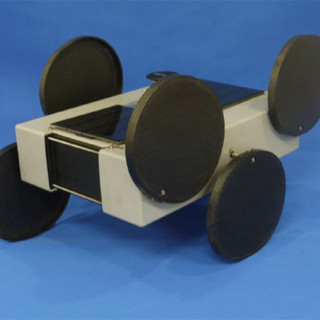
画像33。従来型、高性能型のどちらにも属さないのが今回の3台である |
しかしこれらの重機は、前述したように急傾斜であること、複雑であること、地面が軟らかいこと、そして湿度がとても高いといった日本の林業を難しくしている要因の前に、苦戦を強いられている。欧米のなだらかな丘陵地の林業で使われている大型重機ではまず設置することができなかったし(作業地を確保しなくてはならないという、本末転倒状態になってしまった)、湿気により機械の電子回路が腐植しやすいなどの問題もあり、結局、そうした機械化はうまくいかず、最も事故の多い木を切り倒す際の事故も未だに減っていないというわけだ。
そうした状況を打破するために巽や天竜が開発されているわけだが、試行錯誤の上に考え出されたその設計指針はどのようなものかというと、大きく3点ある。1つ目は、ハードの"形"と"仕掛け"を突き詰めることでシンプルな機械装置を目指すこと、そして必要最小の外界認識と制御方法を求めること。その理由としては、日本の山林で使用する際の前述した厳しい条件に耐えなければならないからである。林業の現場は出来高制のため、機械の故障で作業者の手を止めてしまうわけにはいかないということ、また林業においては機械の故障は作業者自らが直すということが当たり前の世界で、機械がわかりやすい構造である必要があることも理由だ。
2つ目は、メカニズムの考案に当たっては、伝統的に踏襲されてきた"型"と"所作"が尊重されている点だ。林業の世界の伝統はほとんどが経験則で、科学的根拠がないものばかりである。しかし、そうした伝統は長い時間をかけて何世代にもわたって伝えられ、その中で合理的な型や所作に整理されている場合が多い。また、机の上でばかり考えていると、林業は自然を相手にしているものであるため、現場に出てみると言葉や数値で表すことはできなくても、「これはない」といったことがわかるそうで、ロボットとは対極的な位置にあるかも知れないが、直感や経験なども重視しているという。
3つ目は、作業プロセスにおいて、人が最重要構成要素であり続けるということ。全自動を目指すのではなく、作業者による認識と判断で、作業の補正や補助の入力ができるシステムを目指していくとしている。