傾いた太陽電池、転ばぬようにあえて転ぶ……
このほかにも、SLIMはさまざまなユニークな技術や仕組みが詰め込まれている。
太陽電池の角度
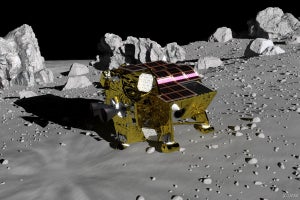
まず、すぐにわかるのが、SLIMを正面から見たときに、機体の水平面に対して太陽電池が斜めに傾けて装着されていることだろう。これにより非対称な、やや奇妙な見た目になっている。
この理由は、太陽電池の発電量をできるかぎり最大化するためである。SLIMは機体を北の方角に向けつつ、月の朝方の時間帯に降りる。つまり、着陸時の衛星の姿勢、向き、そして月から見た太陽の位置があらかじめ決まっているため、それに合わせて最適化された結果なのである。
なお、SLIMの運用可能な時間は、最大で月の日没まで、つまり最大で2週間程度と見積もられている。
-
SLIM(模型)を正面から見たところ。機体の水平面に対して、太陽電池が斜めに傾けて装着されている

転ばぬようにあえて転ぶ、「二段階着陸」
そして、最もユニークな点が着陸方法である。これまで打ち上げられた月着陸機の多くは、4本の脚を持ち、垂直に降りてきて、その脚で踏みしめるように月面に降り立ってきた。
しかし、SLIMが着陸を予定している、「神酒の海」付近の「SHIOLI」クレーター近くの地域は、約15度の傾斜がある。そのため、従来の着陸方法では機体が倒れるなどの危険性がある。また、科学・探査目的の高度化にともない、今後はこのような難しい地形への着陸が当たり前のように求められるとも考えられており、まったく異なる着陸方法が必要となった。
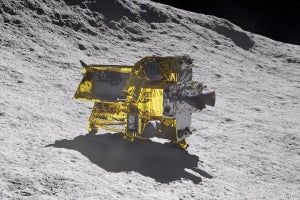
そして開発されたのが、「二段階着陸」という一風変わった方式である。機体を垂直に降下してきたSLIMは、まず機体の後部にある主脚で一度接地したあと、機体を前方に倒して、他の脚を接地させて着陸する。転ばぬためにわざと転ぶという、まさに逆転の発想である。
これは、SLIMのような小型・軽量な機体だからこそ可能な方法であり、また実験やシミュレーションなどによる検討を重ねた結果、安全かつ効率がいい方法だということもわかったという。
-
SLIMは傾斜地に安全に降りるため、「二段階着陸」という一風変わった方法で着陸する (C) JAXA

ぼんぼりのような着陸脚
着陸脚もユニークなもので、アポロの月着陸船などは、脚のダンパーで着陸時の衝撃を吸収していたが、SLIMでは脚からして、アルミニウム製の網目状のぼんぼりのような塊がついているだけという、やはり変わった形をしている。着陸時にはこれがつぶれることで衝撃を吸収できるようになっており、シンプルかつ軽量、安全な仕組みになっている。
また、この脚は全部で5つあり、機体後部に主脚として1つ、前部に2つ、そしてその間に2つ装着されているが、この間にある2つは、他の3つよりもやや奥まった位置に装着されている。その理由は、たとえば岩に乗り上げるようにして着陸してしまった場合でも、かならず安定して静止できるように意図したものだという。
SLIMプロジェクトの主任研究者を務める、ISASの澤井秀次郎氏によると、「もし着陸地点がでこぼこした地形だった場合、3つの脚だけではどこかが浮いてしまうなどして安定できないかもしれません。そこで5つの脚をつけたのですが、そのすべて同じ平面上に装着すると、でこぼこがあったときに、やはりうまく安定できません。そこで、間の2つの脚は、わざと引っ込めた位置に装着することで、どんな地形だったとしても、かならずどこか3点でしっかり接地できるようにしているのです」と語る。
-
SLIMの着陸脚は、アルミニウム製の網目状のぼんぼりのような塊になっており、着陸時にはこれがつぶれることで衝撃を吸収するという、シンプルかつ軽量な仕組みが採用されている (C) JAXA

-
SLIMを裏側から見たところ。透明の四角いカバーが取り付けられている部分に着陸脚がある

着陸後は月の起源の解明にも
さらに、SLIMは工学実証だけでなく、科学探査の使命も背負っている。
もちろん、ピンポイント着陸がミッションのいちばん大きな目的だが、せっかくの機会を生かし、科学観測が計画されている。それも、月の起源と進化を解明するというきわめて野心的な目標である。
これまで「かぐや」などの観測で、月のマントルに由来すると考えられる岩石(カンラン石)が、どこにあるかがおおよそわかっている。SLIMはまさにその岩石がある場所に降りることから、分光カメラを使って成分の分析を行う。
月の起源をめぐっては、地球からちぎれて飛び散った岩石からできたという説や、巨大な天体が地球に衝突し、それによって発生した破片からできたという説、まったく別のところで生まれ、のちに地球の重力によって捕らえられたという説などがある。SLIMの観測によって、月のマントルの成分と、地球の成分とを比較することができることから、そうした仮説の検証ができる。
また、天体の初期の進化過程についてもわかっていないことが多く、その理解につながる重要な知見が得られる可能性もあるという。
小型プローブ「LEV-1」、「LEV-2 (SORA-Q)」
くわえて、SLIMには「LEV-1 (Lunar Excursion Vehicle-1)」と「LEV-2 (SORA-Q)」という2機の小型プローブ(探査車)も搭載しており、着陸の直前に分離し、月面に降ろされる。
LEV-1は月面を跳躍しながら自由自在に移動探査できるプローブで、質量は2.1kg。SLIMより先に着陸したあと、SLIMが着陸する様子や、着陸後の状態などを、カメラや加速度センサーなどで記録し、地球との地球直接通信により送信することができる。また、飛び跳ねるようにして月面を移動できる装置も搭載し、実際に移動できるかどうかの技術実証も行う。活動可能な時間は40分以上が予定されている。
一方のLEV-2(SORA-Q)は質量約250gで、打ち上げ時は球形をしているものの、2つに割れるようにして変形し、球の半分ずつがそれぞれ車輪となって、月面を二輪走行することができる。また、カメラも搭載しており、SLIM本体や周辺の画像を撮影し、さらにその画像の中から良質なものを自律的に選択肢、LEV-1を中継して地球へ送信することができる。活動期間は約2時間が予定されている。
-
SLIMは月面の科学観測や、小型プローブの展開も行う (C) JAXA

-
SLIMに搭載された状態の「LEV-1」。ちなみに「LEV-2 (SORA-Q)」はこの奥に搭載されている

SLIMの打ち上げは2023年8月以降の予定で、X線分光撮像衛星(XRISM)とともにH-IIAロケット47号機に搭載され、鹿児島県の種子島宇宙センターから飛び立つ。月面着陸は打ち上げから4~6か月後の予定となっている。
SLIMはその名のとおり、小さくて軽いスリムな探査機ではあるものの、さまざまな最先端の技術と、創意工夫と、そして宇宙探査の未来を拓く可能性をもっている。「山椒は小粒でもぴりりと辛い」ということわざのように、その技術で世界をシビれさせる日を心待ちにしたい。
打ち上げに向けて準備が進むSLIM