アポロ計画に代表されるように、これまで人類は、月にさまざまな探査機を送り込んできた。そしていま、有人月探査計画「アルテミス」をはじめ、月探査がふたたび活発になろうとしている。
こうした中、月の科学者は嬉しくも悩ましい課題に直面している。これまでの探査で、月面の詳細な地図ができ、「どこを調べれば科学的におもしろいのか」が詳しくわかるようになった一方で、その場所を狙って正確に着陸する術がなかったのである。
この課題を解決するため、宇宙航空研究開発機構(JAXA)は小型月着陸実証機「SLIM(スリム)」を開発した。SLIMが目指すのは、精度100mという、従来とは桁違いの高い精度での着陸技術の実証である。さらに将来の月・惑星探査を見据え、着陸に必要な装置の軽量化も実現した。
打ち上げは2023年8月以降の予定で、それに先立つ6月4日、その機体が種子島宇宙センターで報道公開された。名前のとおりスリムな機体に秘められた、数々の最先端技術と未来の可能性をみていこう。
-
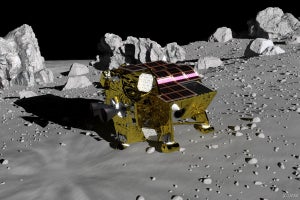
6月4日、種子島宇宙センターで公開された小型月着陸実証機「SLIM」

これからの月探査に必要なピンポイント着陸技術
人類はこれまで、半世紀前のアポロ計画に代表されるように、月面へさまざまな探査機や宇宙船を送り込んできた。その着陸精度は数km~十数kmというもので、これはたとえるなら、東京駅丸の内駅前広場に着陸するつもりが、下北沢駅に降り立ってしまうようなものである。
もちろん、月面に無事に降り立つということだけでも、まだ技術的なハードルは高い。また、アポロ計画で宇宙飛行士が降り立ったような、「海」と呼ばれる広大で平坦な領域に着陸するのであれば、それくらいの精度でも問題はなかった。
しかし、SLIMのプロジェクト・マネージャーを務めるJAXA 宇宙科学研究所(ISAS)の坂井真一郎氏は、「今後の月探査を見据えたとき、私たちはいま精度のままではいけないと考えています」と語る。
そこでSLIMでは、“精度100m”という、ピンポイント着陸技術の実証を目指している。
その背景には、大きく2つの理由がある。
ひとつは、月面の詳細な地図が手に入ったことである。近年、米国航空宇宙局(NASA)の月探査機「ルナー・リコネサンス・オービター(NRO)」や、JAXAの月周回衛星「かぐや」などによって、高分解能な月面観測データが大量にもたらされた。その結果、現在の月探査ミッションは、「あのクレーターの隣にある、あの岩石を調べたい」というほどの細かさで議論されるようになっている。そんな科学者の願いを実現するためには、そうした岩石のすぐ近くに着陸できる技術が必要になる。
また、科学的に興味深い場所というのは、クレーターの縁のように傾斜があったり、大小様々な岩石が転がっていたり、凹凸の厳しい地形であったりと、複雑な地形の中にあることが多い。そのため、その中のわずかな隙間を狙って着陸することも求められる。
もうひとつの理由が、アルテミス計画に代表されように、月探査がふたたび活発になろうとしていることである。とくにアルテミス計画では、月の極域にあると考えられている水(氷)を採り出して、資源として利用しようということが考えられている。
しかし、その月の水は、つねに日光がまったく当たらない「永久影」、「永久凍土」にあると考えられており、その中で探査を持続的に行うことは難しい。ただ、その近くには、逆につねに日光が当たり続けている「永久日照」の領域があるため、まずは永久日照の領域に降り、電力や熱を確保しつつ、永久影の中へアタックしていくというような運用が求められる。こうした、永久影にほど近い永久日照の領域という、非常に限られた狭い領域に着陸するためにも、ピンポイント着陸技術が求められているのである。
-
NASAの月探査機「LRO」が撮影した、SLIMが着陸する予定の場所の近くにある「SHIOLI」クレーター。この画像のように、現在月面は数十cmというきわめて高い分解能で撮影し尽くされており、科学者たちは「あのクレーターの隣にある、あの岩石を調べたい」といった粒度で議論するようになっている (C) NASA/GSFC/ASU

SLIMが目指す月への高精度着陸技術の実証
精度100mという高精度の着陸を目指すため、SLIMは「画像照合航法」と「自律的な航法誘導制御」という、大きく2つの新しい技術を使う。
画像照合航法というのは、カメラで自分の眼下に広がる月面を撮影した画像を使い、自身の位置を推定して航行する技術のことで、まず探査機が搭載している航法カメラが撮影した画像を処理して、「どこがクレーターか」を抽出する。そして、ありえる探査機位置を包含する広い領域の地図から、抽出されたクレーターのパターンと一致する場所を特定する。これを繰り返すことで、自分の位置を測定し、そして修正することで、ピンポイントな着陸を実現する。
この技術の実現にあたっては、処理時間が重要になる。現状の宇宙用CPUは、地上用と比べて100分の1程度の能力しかない。そこで、宇宙用FPGA上でも数秒の処理時間で済む画像処理アルゴリズムが開発された。これは長年、ISASと大学とが共同で研究したことで実現のめどが立ったという。
さらに、地球と月との間には約2.5秒のタイムラグがあるため、照合や特定の作業を、地球の管制室でやっていたのでは間に合わない。そのため、自律的な航法誘導制御によって、月面上の目標地点に接近し、さらに着陸地点上空では画像ベースの障害物検出・回避を自律的に行うなど、SLIM自身のコンピューターが自律的に判断して行うようになっている。
坂井氏は「これほどの高精度の月面着陸は、計画が予定どおりいけば、SLIMが世界初になると思います。ただ、米国の民間企業などでは、将来的に高精度の着陸をやると公表しているところもあり、今後、ピンポイント着陸という技術は、競争的な領域になると考えています」と語る。
-
画像照合航法の概要 (C) JAXA

軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化に貢献
SLIMはまた、小型・軽量な、まさにその名前のとおり“スリム”な探査機システムの実証も、目的のひとつとなっている。
将来の月・惑星探査においては、いま以上に観測装置の高度化が求められる。ただ、高度な装置、たとえば天体の地表を事細かに観測したり、天体から岩石を回収して地球に持ち帰ったりできる装置は、どうしても大きく、そして重くなってしまう。そうした装置を積むためには、探査機の機体(筐体)やエンジン、太陽電池、コンピューターなどを軽量化し、その浮いた分を観測装置に充てることが必要となる。
また、岩などが転がっている複雑で狭い場所に降りようとするなら、小さな機体のほうが有利でもある。
そこで、SLIMを通じて、探査機システムの小型・軽量化技術を実証し、将来の太陽系探査の要求に応えようというのである。
その工夫が最もよくわかるのは、SLIMの外見だろう。多くの衛星や探査機は、箱のような構体の中に、推進剤のタンクが入っている。しかしSLIMは、軽量化のために、タンクそのものが探査機の主構造も兼ねており、いわばタンクの外側に直接いろんな装置がくっついているような姿かたちをしている。そのタンク自身も、燃料と酸化剤を隔壁で区切るだけの一体型タンクとなっており、軽量化も図られている。
また、SLIMの下部には、軌道制御や月面着陸時の速度制御に使用する、500N級スラスターが2基装着されている。このスラスターには、金星探査機「あかつき」に採用された技術をルーツにもつ、セラミック燃焼器を使用しているほか、世界的にも例のない幅広い推力範囲とパルス作動を実現し、その高い性能から推進系全体の質量低減にも寄与している。
このほか、航法カメラやレーザー距離(高度)計、太陽電池、通信に使うSバンドのトランスポンダー、SUSを外装に用いたSUSラミネート電池、電力制御分配器など、ありとあらゆる部分で最先端技術による小型・軽量化と、さらに国産化が図られている。
これにより、SLIMの寸法は高さ約2.4m、縦約1.7m、横約2.7mで、打ち上げ時の質量は約700kg、推進薬が空になったときの質量は200kgと、小型の自動車くらいの規模しかない。
坂井氏によると「これまでの月着陸機と比べ、SLIMはかなり小型・軽量に仕上がっています。過去にこれほど小さな探査機が月に降り立った例はないでしょう」と語る。
-
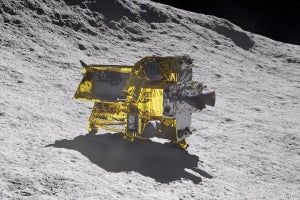
SLIMはその名のとおり、小型・軽量な、まさに“スリム”な姿かたちをしている

小型・軽量な探査機システムを実現する技術の一例 (C) JAXA