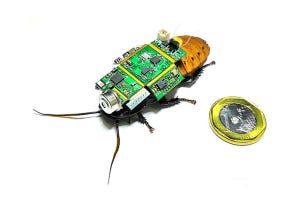
今回の研究では、体長約6cmのマダガスカルゴキブリ(昆虫)が用いられた。電子デバイスのうち、無線移動制御モジュールとリチウムポリマー電池(LiPo)は柔らかいバックパックを介して、昆虫の胸部背側の曲面に沿って装備。厚さ4μmの超薄型有機太陽電池モジュールが腹部背側に備えられた。
-
(左)サイボーグ昆虫の概要図。(右上)再充電可能なサイボーグ昆虫。(右下)3Dプリントバックパックの概要図 (出所:早大Webサイト)

LiPoなどを搭載したバックパックは、昆虫の正確な3Dモデルを基に設計され、弾性ポリマーが3Dプリントにて作製された。バックパックの昆虫と接する側は、胸部背側の曲面形状と一致する柱状構造に設計されたという。このような構造により、昆虫の個体間の形状の違いによらず、曲面に完全にフィットし、硬い電子デバイスを安定的に実装できたという。また、この接着は、繁殖環境において1カ月後でも維持されたともしている。
さらに、昆虫の腹部の観察が行われ、その自由度を確保するため、ポリマーフィルム(フィルム)上に作製された超薄型有機太陽電池を、接着剤領域と非接着剤領域を交互に配置する「飛び石構造」で昆虫の腹部背側へ貼り付ける方法を採用。この方法での取り付けの有効性が、昆虫の障害物の通過にかかる時間によって定量化されたほか、地面の上でひっくり返った状態から元の体勢に戻る起き上がり能力を評価する形で、同方法の有効性が検証された。その結果、腹部背側への十分に薄いフィルムと飛び石構造の組み合わせは、昆虫の運動性を保持することが示されたとする。
-
超薄型有機太陽電池の腹部実装の概要図 (出所:早大Webサイト)

加えて、超薄型有機太陽電池モジュールの出力を調べたところ、昆虫腹部の曲面形状の有効面積を最大化することで、最大17.2mWの高出力を実現できることが判明したという。
実際に生きたサイボーグ昆虫を用いて、充電と無線移動制御の検証が行われたところ、バッテリーが完全に放電された状態から、疑似太陽光をサイボーグ昆虫上に30分間照射しバッテリーを充電。充電されたバッテリーからの電力を利用し、刺激オン・オフを制御する信号をサイボーグ昆虫に無線受信させ、約2分間にわたって昆虫尾葉に接続した刺激電極へ刺激信号を入力することで、右方向への移動制御を複数回試行し、無線制御が繰り返し成功したことが確認されたとする。
-
再充電可能なサイボーグ昆虫の無線通信による行動制御 (出所:早大Webサイト)

なお、腹部の変形は多くの昆虫で見られることから、この研究で提案された飛び石構造で超薄型の電子素子を取り付ける戦略は、ほかの昆虫種にも適用可能だと研究チームでは説明するほか、基本動作中の昆虫の胸部と腹部の変形を考慮すると、胸部に剛性または柔軟性のある要素を置き、腹部に超軟質デバイスを取り付けるハイブリッド電子システムは、サイボーグ昆虫に効果的な設計であるといえるとしている。今回の成果については、昆虫の寿命が続く限り、電池切れの心配なく長時間かつ長距離における活動が可能となり、サイボーグ昆虫の用途が拡大することが期待できるとしており、今後は、より薄型化された制御回路を用い、センサなど、ほかのコンポーネントと組み合わせることで、サイボーグ昆虫の機能をさらに拡大できることも考えられるとしている。