実験では、カップとほうきのような2つの単語を画面に提示し、その言葉が表す物体の大きさを比べ、どちらが大きいかを口頭で答えるという方法を採用。このとき、カップやほうきのような「手で操作可能な物体を表す単語」について答える条件と、「ビル」や「街灯」のような「手で操作できない物体を表す単語」について答える条件が設けられた。これは単語の意味に関する処理であり、この課題に答えるためには、2つの単語が表す物体を思い浮かべて大きさを比較する必要がある。
身体の動きについては、手を机の上に置いて拘束しない条件と、透明アクリル板で手の動きを拘束する条件が設けられた。透明アクリル板を用いたのは、手を机の上に置く条件と身体の姿勢を一致させ、かつ手が見える状態に保つためだとする。これによって、2つの条件の間で「手の動きが拘束されているかどうか」だけを変化させることが可能となる。
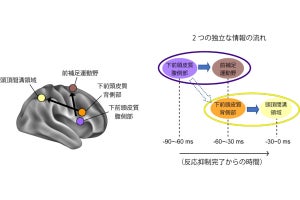
口頭反応の速さは、単語が画面に提示されてから実験参加者の発声が始まるまでの時間を、音声波形を分析することで計測が行われた。脳活動の測定には、身体を拘束せずに行えるfNIRSが用いられた。測定する部位は、道具などに関する意味処理を担うことが知られている左脳の「頭頂間溝」と「下頭頂小葉(縁状回・角回)」とされた。
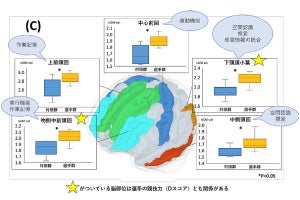
実験の結果、「手で操作可能な物体を表す単語」に対する左脳の頭頂間溝と下頭頂小葉の活動は、手の拘束による有意な影響を受けることが判明。また口頭反応の速さも有意な影響を受け、手の拘束によって手で操作可能な物体に対する口頭反応が阻害されることも確認された。
-
測定された脳部位における活動の強さ。*は条件間で有意な差があったことが示されている。手の拘束の有無×手で操作できるかどうかの交互作用は。すべての部位で有意だったという (出所:大阪公大プレスリリースPDF)

これらのことから、手の動きを拘束することが物体の意味に関する処理に影響することを示し、意味が身体と環境との相互作用を通して表されるという身体化認知の考え方を裏付けるものだと研究チームでは説明している。
なお、今回の研究成果については、手の動きが物体の意味処理に影響を与えることを示しており、「手を動かして学ぶ」ことの有効性を確認したといえるとしており、幼児が身の回りの物体に触れ、手で操作することは物体の意味を学ぶ上でも重要だと考えられるとしているほか、ヒトにとっての意味が身体の動きと関連することが示されたことは、AIが意味を学習する際にも身体化認知の考え方が有効であることを示唆しているともしている。記号着地の問題は、ヒトと同等の汎用型AIを開発するためには、クリアしなければならない難題の1つであり、これまでにもAIにロボットの身体を与え、幼児のように身体化認知で学んでいくことが提案されているが、今回の研究成果は、その解決の方向性を改めて示したともいえるとしている。