今回開発された分子ロボットの基本ユニットは、モータータンパク質(駆動系)、DNA分子コンピュータ(制御系)、フォトクロミック色素(センサー系)で構成されており、化学的な手法で組み上げられている。
-
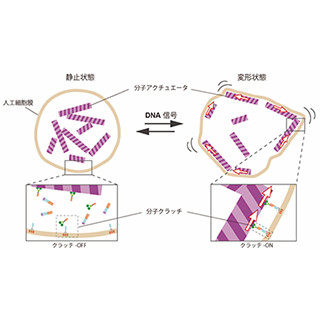
モータータンパク質(駆動系)、DNA分子コンピュータ(制御系)、フォトクロミック色素(センサー系)から構成される分子ロボットの模式図。光照射によるアゾベンゼンのシス-トランス異性化反応により、分子ロボットによる群れの形成解離が引き起こされる (出所:プレスリリースPDF)

モータータンパク質は、アデノシン三リン酸(ATP)の加水分解によって生じる化学エネルギーを運動に変換するタンパク質であり、今回は、微小管とその上を動くキネシンの組み合わせが採用されたという。また、DNAコンピュータは、DNAを構成する4種類の塩基の分子配列および酵素の作用を、演算処理に応用したもので、センサー系のフォトクロミック色素にはアゾベンゼンが使われており、可視光や紫外光で群れの形成解離の遠隔操作に用いられる仕組みが採用されているとのことで、これらを備えた分子ロボット群は、約100万体ほどが作られたという。
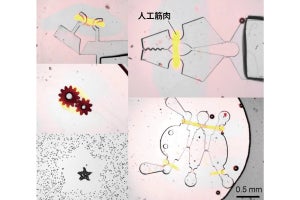
分子ロボットたちの性能については、可視光照射下で群れが形成され、紫外光照射下で離散することが確認されたほか、直径数~数十μmのさまざまなサイズのフォトクロミック色素を導入したDNAが修飾され、光照射による結合解離機構を持たせたポリスチレン製マイクロビーズを対象とした、物資輸送実験が行われており、積荷の輸送先は、フォトマスクなどを用いて、紫外光を局所的に照射することで指定する仕組みが採用されたとする。
実験では、分子ロボット単体での輸送実験から、3μmほどのビーズが、可視光照射下(波長480nm)で捕捉・運搬され、紫外光(波長365nm)照射下で放出されることが確認されたほか、分子ロボット群による物質輸送実験でも、単体時と同様に可視光照射下でビーズが捕捉・輸送され、紫外光照射下で放出されることが確認されたとするが、その輸送可能なビーズのサイズは単体時の10倍、30μmのものまで輸送できることが確認されたという。
-
(上)分子ロボットの群れによる物質輸送の概念図。(下)実際に物質を輸送している分子ロボットの蛍光顕微鏡写真。輸送される物質は直径1.1μmのポリスチレン製ビーズ(矢印)。図中の数字の単位は分。スケールバーは20μm (出所:プレスリリースPDF)

また、3μmのビーズに限定して、分子ロボットの単体と群れによる輸送の比較が行われたところ、群れによる輸送では5倍ほど効率(輸送距離と輸送量)が向上することも判明したほか、紫外光の照射位置を指定することで、ビーズを任意の場所に集めることにも成功。輸送の空間精度も30μm以下と誤差も少ないことが示されたとしている。
-
(上)紫外光照射位置の指定による積荷集積の概念図。(下)実際に紫外光照射下で積荷を放出している分子ロボットの蛍光顕微鏡写真。図中の数字の単位は分。スケールバーは50μm (出所:プレスリリースPDF)

今回の研究成果を踏まえ、研究チームでは5年後には、分子ロボット群を用いた、薬剤送達や汚染物質回収、分子発電素子(化学エネルギーから電気エネルギーを作り出す微小な発電機で、NEDOのプロジェクトにより開発研究中)、微量検出素子(微量な核酸情報や病原体などを濃縮し検出するシステム)、マイクロリアクタ(分子ロボットによるナノ部品の組み上げ工程や化学プラントなどのシステム)などが実現されるだろうとしている。