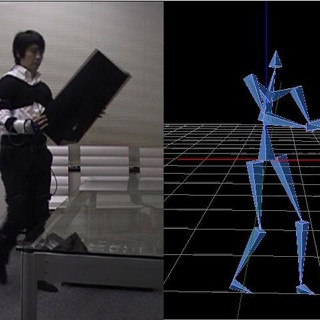
ソフト上に自分の動きを反映したモデルが出現した。キャリブレーションでセンサーの位置関係を学習したため、このモデルはこれ以降、筆者の動きをトレースして動くのである。
……はずなのだが、ここで不可解な現象が。
右腕を動かすと左腕が動き、左腕を動かすと右腕がありえない方向にねじまがるのだ。
いったいどういうことなのか……と思ったら、腕につけるセンサーを左右で間違えていた上に、片方が変な位置にズレてしまってうまく反映されなかったようだ。各パーツはどこに装着するかが決まっているので、特に「R」「L」の表記をよく見て間違えないようにしよう。付け直しになると面倒だからね……。
気を取り直してもう一度トライ。今度はうまくいった。
……と思ったのだが、どうもモデルの動きがぎこちない。大きな動きとしては合っているのだが、どうも微妙におかしくなることがある。つま先の方向だけ違っていたり……。

|

|
たとえばジョジョ立ちをすると |
こんなふうにデータ化される。これは合っている |

|

|
続いて波動拳 |
合っているように見えるのだけど、つま先がおかしな方向を向いている |
キャリブレーションはしっかりやったはずなので、なぜ時々こうなるのかは謎である。筆者がモーションキャプチャーに慣れていないこともあるだろうが、手軽さや使いやすさを求めて本製品を購入する個人開発者も少なくないだろうから、精度を上げるコツなどを公式で発信してもらえるとありがたいかも。
そこで販売元のアユートに聞いてみたところ、こうした動作が起こってしまうのは「磁気干渉の影響」が関係しているとのこと。ニューロンは磁気センサーを内蔵しているので、磁気を発するもの(PCなど)の近くはニューロンに影響がでるとのことなので、有線接続で、PCの画面を確認しながらやってみたのが影響しているのかもしれない。
また、パーツや「Neuron」の場所がずれてしまったりすると影響が出てしまう可能性もあるらしい。添付の説明書をよく見て位置を微調整して、しっかりと固定するなどしてみるとよさそう。
この辺りの情報は、ホームページ上で随時FAQを更新していくとのこと。発表後、同社には研究所や大学、スタートアップなど、製品に興味を持った人たちから多くの問い合わせが寄せられているそうで、今後ユーザーニーズに合わせ更新していくそうだ。
ということで、「NOITOM PERCEPTION NEURON」を試してみたが、ド素人が何の準備もなく説明書を読んだだけでこれだけできるのは驚きだ。専用のスタジオも必要ないし、本当に会議室だけで動きをデータ化することができた。精度については多少の調整が必要なケースもありそうだが、それよりも前述のメリットの方がはるかに大きいだろう。まだ国内では発売間もない製品なので、ユーザー同士で情報交換を図るのも手だと思う。