ソフトウェア開発
ハードができたら、次はソフトである。
ロケットの検出には、オープンソースの画像処理ライブラリ「OpenCV」を利用する。OpenCVには、単純な画像処理だけでなく、構造解析やパターン認識のような高度な機能も含まれている。こういった機能を利用すれば、画像認識に詳しくなくても、比較的簡単に画像認識アプリが作れるので非常に便利だ。
プログラミング言語は、OpenCVさえ動けば何でも良いのだが、今回は「Python」を選んだ。筆者も若い頃はコンパイル言語を好んで使っていたのだが、なんと言ってもスクリプト言語はとにかくトライ&エラーが楽だ。Pythonを使った経験は無かったものの、参考書籍を買って文法を覚えてしまえばとりあえずなんとかなる。
画像の中からロケットの位置を検出するために、今回実装した処理の流れは以下のようになる。これ以外にも、様々なアルゴリズムが考えられるが、なるべくシンプルになるように、ロケットの噴射炎を追跡する方式を採用した。
- 必要なのは「明るさ」だけなので、入力画像をグレースケール化
- ガウスフィルタで平滑化し、ノイズを除去
- ある閾値で2値化する
- 白い部分(=噴射炎)の輪郭を抽出
- データを扱いやすくするために、輪郭を内包する矩形を計算
- もし複数検出されていた場合、サイズが最大のものを噴射炎と判断
- その矩形の座標を元に、サーボを動かす指示を出す
- 以上を繰り返す
上記のうち、処理3で使う閾値はスライドバーを用意して、変更できるようにしてある。噴射炎のみを抽出させるため、なるべく値は高くしたいが、高すぎると検出できなくなる恐れがある。かといって必要以上に低いと、周辺の雲まで検出してしまう。ロケットの打ち上げの場合、本番の噴射炎で事前にテストできないのが難しいところだ。

|
|
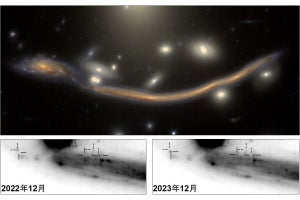
自動追尾プログラムのインタフェース。左が入力画像で右が処理画像(赤枠が最大の矩形)だ。閾値を低くしすぎると、このように他の物体を検出する恐れが |
また処理7では、サーボを動かせる方向に制約を設けた。エンジンを点火してもすぐにロケットは動かないため、打ち上げ直後の3秒までは雲台を固定。その後しばらくはほぼ垂直に上昇するので、10秒までは上にのみ動かし、10秒以降は右側にも解放する。こういった制限を付けることで、誤検出があった時でも、変な方向に動くのを避けようとしている。
Pythonのソースコードはこちら。
# coding: UTF-8
import cv2
import serial
import datetime
#トラックバー処理
def onTrackbarT(position):
global threshold
threshold = position
def onTrackbarH(position):
global hour
hour = position
def onTrackbarM(position):
global min
min = position
def onTrackbarS(position):
global sec
sec = position
#サーボ駆動
def servo_move(ser, pos1, pos2):
str1 = str(pos1)
str2 = str(pos2)
ser.write(str1.zfill(5)+str2.zfill(5))
#メイン関数
def main():
#パラメータ初期化
global threshold, hour, min, sec
threshold = 232
hour, min, sec = 15, 50, 0
#サーボ移動量(ズーム無しでは10、ズーム有りでは5に)
step = 5
try:
ser = serial.Serial(6, 115200) #COM7
except:
print(u"シリアルポートがオープンできません")
exit()
cap = cv2.VideoCapture(1)
cap.set(cv2.cv.CV_CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.cv.CV_CAP_PROP_FRAME_HEIGHT, 480)
cv2.namedWindow("View")
cv2.createTrackbar("Threshold", "View", threshold, 255, onTrackbarT)
cv2.createTrackbar("hour", "View", hour, 23, onTrackbarH)
cv2.createTrackbar("min", "View", min, 59, onTrackbarM)
cv2.createTrackbar("sec", "View", sec, 59, onTrackbarS)
#サーボ初期位置
posx = 7500
posy = 10167
servo_move(ser, posx, posy)
while(True):
ret, img = cap.read()
#グレースケール
img_g = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#ガウスフィルタ
img_g = cv2.GaussianBlur(img_g, (15,15), 0)
#2値化
ret, img_g = cv2.threshold(img_g, threshold, 255, cv2.THRESH_BINARY)
#カラー化
img_out = cv2.cvtColor(img_g, cv2.COLOR_GRAY2BGR)
#輪郭抽出
contours, hierarchy = cv2.findContours(img_g, 1, 2)
#矩形を求める
mw, mh = 0, 0
flg_detect = 0
for cont in contours:
x,y,w,h = cv2.boundingRect(cont)
cv2.rectangle(img_out, (x, y), (x+w, y+h), (0, 255, 0), 1)
if mw*mh < w*h:
mw, mh, mx, my = w, h, x, y
flg_detect = 1
#最大面積の矩形を赤で
if flg_detect == 1:
cv2.rectangle(img_out, (mx, my), (mx+mw, my+mh), (0, 50, 255), 1)
#現在時刻と起動時刻の比較
t_start = datetime.time(hour, min, sec)
t_lock = datetime.time(hour, min, sec+2)
t_up = datetime.time(hour, min, sec+10)
t_now = datetime.datetime.now()
if t_start > t_now.time():
#待機
print("wait")
elif t_lock > t_now.time():
#3秒までは固定
print("lock")
elif t_up > t_now.time():
#10秒までは上昇のみ
print("go up")
if flg_detect == 1:
if my < 240:
posy -= step
servo_move(ser, posx, posy)
else:
#10秒以降は上昇+右
print("go up and right")
if flg_detect == 1:
if mx+mw > 320:
posx += step
if my < 240:
posy -= step
servo_move(ser, posx, posy)
#ウィンドウ表示
img_view = cv2.hconcat([img, img_out])
cv2.imshow("View",img_view)
if cv2.waitKey(10) > 0:
break
#終了処理
cap.release()
cv2.destroyAllWindows()
#メイン関数実行
main()