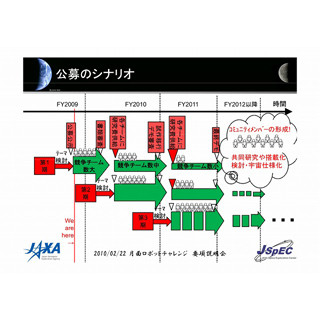
クレータ中央丘岩石採取
規定課題の1つである「クレータ中央丘岩石採取」は、クレータ内にある山(クレータ中央丘)の頂上に登って、サンプル(岩石など)を採取、それを麓まで持ち帰ることを想定したミッション。レゴリス(月の砂)で覆われた斜面は軟弱で崩れやすいため、そうした環境でも安定して走行できる能力が求められる。

|
|
クレータ中央丘岩石採取の作業内容の想定。中央丘の高さは2,000mとかなり高い |
隕石の衝突によってできたと考えられるクレータ中央丘には、月の内部物質が露出している可能性があり、そこからサンプルを得ることができれば、月面を深く掘削することなく、内部の様子が調べられる。科学的な意義が大きい探査である。
今回の実験では、中田島砂丘の斜面が使われた。斜面の高さは数m程度だが、大きな岩石が敷き詰められ、月面環境に似せられていた。

|

|
|
斜面の一部は、月面を模した岩石混じりのコースになっていた |
その隣には、深さ50cmほどの小さな"クレータ"も作られていた |
東北大学(永谷研究室)の「TrackWalker-II」は、全面クローラの本体と、両側にあるサイドクローラで構成されるロボット。特徴は、2種類の移動モードを持つことだ。1つは、クローラの回転により走行するモード。これは多くのレスキューロボットで見られる一般的なスタイルで、不整地での走行に適している。

|

|
|
東北大学(永谷研究室)の「TrackWalker-II」。重量は約20kgで、6自由度を持つ |
サイドクローラの角度は自由に変えることができる。左右を独立して動かすことも可能 |
もう1つが面白い。こちらは平行クランク機構を使って、まるで歩くように、本体とサイドクローラを交互に前に出して進むモード。こちらは軟弱な地盤上での移動に適しているという。TrackWalker-IIは、この2種類の移動モードを切り替えることで、より多様な環境で活動できるよう考えられている。
今回の実験では、公開前の練習で一部のサーボが壊れてしまい、残念ながら歩行モードは見ることができなかったのだが、クローラ走行だけでもこの程度の斜面であれば、問題なく走行することができていた。
|
サブクローラを活用しながら斜面を登る「TrackWalker-II」 |
愛知工科大学(中谷研究室)の「LUBOT(Lunar robot)」は、ロッカーボギー機構を採用した8輪型のロボット。このロボットはクローラではなく車輪を採用しているが、柔らかい車輪を使うことで接地面積を増やし、クローラと同様の効果を得るのだという。またロッカーボギーなので、車輪は地面にならって動き、岩があっても乗り越える能力が高い。

|

|
|
愛知工科大学(中谷研究室)の「LUBOT」。サンプル回収のためのマニピュレータも装備 |
移動の特徴はこのロッカーボギー機構。3カ所の支点により、車輪の傾きも変わる |
月は他の天体に比べ近いとはいえ、通信には数秒オーダーのタイムラグが発生する。そのため運用にも工夫が必要だが、このロボットでは、オペレータが直接的に遠隔操作するのではなく、より高度な「半自律運用」を実装。オペレータは画面上で目的地を指定するだけで、ロボットは自律的にその地点まで移動する。
|
斜面を下る「LUBOT」。地面にならってロッカーボギーが動いている様子が見える |
また、月面ロボットチャレンジとは別の共同研究になるが、東京工業大学(広瀬研究室)が開発した「Tri-Star IV」も同時に実験を行っていた。これは、永久影のあるクレータ内部を探査するためのロボットで、急勾配の斜面でも降りられるように、ロープを使うのが特徴。この仕組みなら、モーターのトルクが十分あれば、90°近くでも大丈夫だ。

|

|
|
着陸機の格納スペースが狭くても大丈夫なように、「Tri-Star IV」はコンパクトに畳むことができる |
後輪を展開するとこのような3輪ロボットに。前輪には中央に溝があり、リールとして機能する |
実験前のデモでは、コンパクトに格納した状態から、3輪が展開する様子も披露。前輪はリールも兼用しており、上から張られたロープを巻き取りながら、斜面を登り切った。Tri-Star IVは前輪が1輪、後輪が2輪の3輪型のロボットだが、これは車輪の個数を最小限にする代わりに1個あたりの直径を大きくし、走行性能を高くするコンセプトだとか。
|
斜面を登る「Tri-Star IV」。見事に上まで登り切った |
|
「Tri-Star IV」のサンプル回収の様子。結果はちょっと残念なことに… |
|
東工大は別のロボットの走行実験も。砂浜を耕しているようにも見える… |