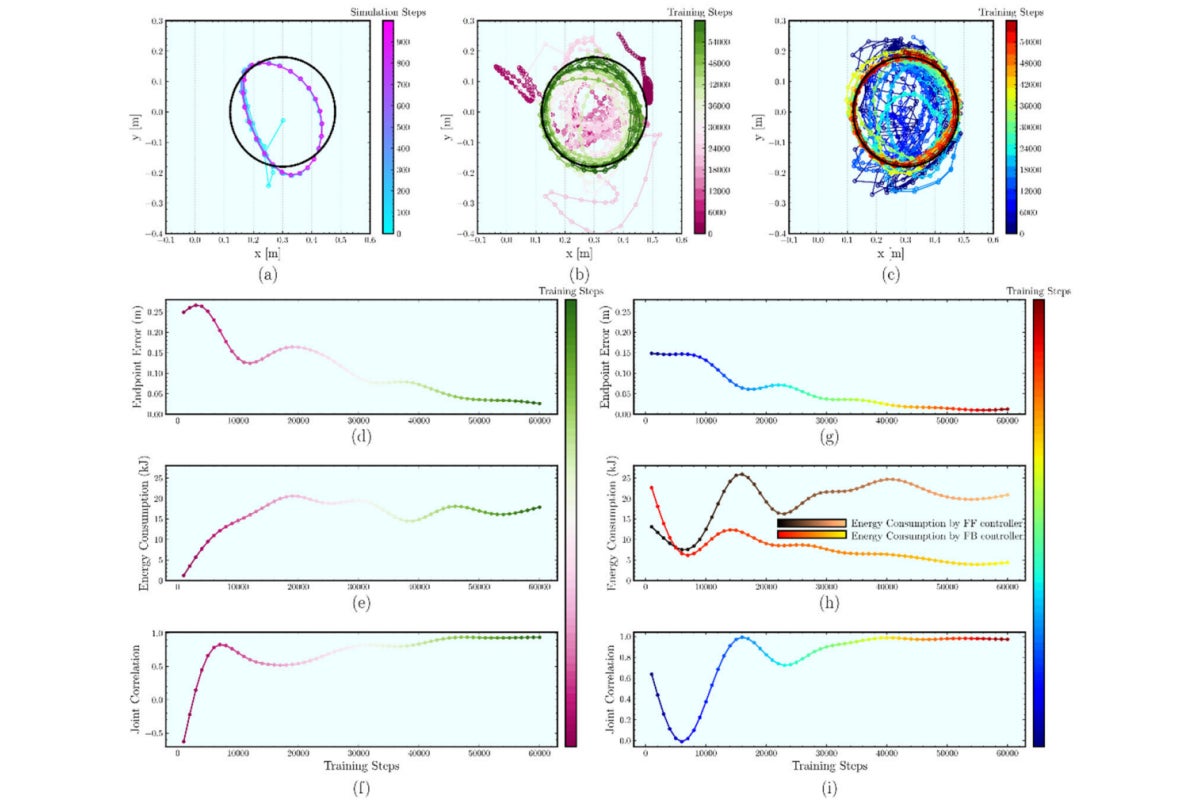
(a)~(c)は7自由度アームの終点遷移について。(a)PDフィードバック制御。(b)DRL制御。(c)同じく、フィードバック制御と併用したPDRL制御の場合。(d)と(g)は終点誤差の推移。(d)DRL。(g)PDRL。(e)と(h)はエネルギー消費量の推移。(e)DRL、(h)PDRLで、エネルギー消費がフィードバックからフィードフォワードに遷移していることが見て取れる。(f)と(i)は関節連動性の変化。(f)DRL。(i)PDRLで、関節連動性がフィードフォワードのエネルギー消費量に対応していることが確認できる (出所:東北大プレスリリースPDF)


日本の製造業の根幹に存在する「ものづくり」。そんな製造業の第一線で活躍するエンジニアたちに、シミュレーションや3Dプリンタ、3D CADの活用などで大きく変わろうとしている現場の情報や技術トレンド、ホットなニュースをお届けします