レーダーが登場したのは第2次世界大戦からだが、当時は当然ながら、アナログ電子回路だけで動いていた。しかし、それでは性能や使い勝手の面で問題がある。コンピュータ制御を取り入れることで改善できるが、代わりにソフトウェア開発の手間が発生した。では、レーダーでコンピュータをどんな風に使っているのだろうか。
レーダーの基本
レーダーというのは、「電波を発信して、それが何かに当たって反射してきた時に、その受信波をキャッチする」ことで探知を成立させる道具。その際、「送信」と「受信」を交互に行うのが普通だ。
なぜかといえば、「送信してから、反射波が戻ってくるまでの時間」で、探知目標までの距離がわかるからだ。それを実現するには、反射波を聴き取れるようになっていなければならない。送信用と受信用のアンテナを別々に用意するとレーダー機器が大きくなってしまうから、デュプレクサーという機器を用意して、送信と受信を交互に切り替えている。
では、探知目標の方位はどうやって知るかというと、反射波が戻ってきた向きで判断する。アンテナの向きを機械的に変えている場合、アンテナがどちらを向いている時に送信と受信を行ったかがわかっていれば、アンテナの向き、すなわち探知目標の向きである。
といった話を頭に入れた上で本題に進む。
フェーズド・アレイ・レーダーの制御
アンテナを機械的に回転させる方法はわかりやすいが、可動部ができてしまう。しかも、回転させるジョイントの部分に電気配線を通さなければならないので、構造が複雑になる。
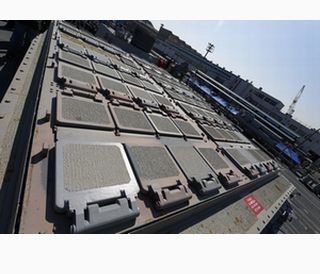
そこで考え出されたのが、フェーズド・アレイ・レーダー。アレイという名の通り、アンテナは単一のアンテナではなく、複数のアンテナを並べた構成になっている。
-
わかりやすいのは、パトリオット地対空ミサイルのレーダー。おおむね円形のアンテナ・アレイが、多数の小さなアンテナの集合体になっている様子がわかる

それぞれのアンテナが出す電波は微弱だが、数が多いので、複数のアンテナを同時に作動させれば強力な合成波を送信できる。そして、複数のアンテナから電波を発信するタイミングによって、合成波の向きが変わる。
すべてのアンテナから同時に送信すれば、合成波はアンテナ平面と直角の方向に向かう。ところが、アンテナごとに送信のタイミング(位相)を変えると、合成波の向きはアンテナ平面と直角ではなくなる。
シンプルな例を出すと。横に10個のアンテナが並んでいるとする。そして、右から左に向けて順に送信させる。送信する間隔を0.001秒にする場合と0.005秒にする場合では当然ながら、生成する合成波の向きは変わる。
これを機械的に制御しろといわれたらゾッとしない話だから、コンピュータ制御にする。ということは、コンピュータのプログラム次第で、狙った方向に向けて合成波を送り出せる理屈になる。
では受信はどうか。反射波がアンテナ平面と直角に入射すれば、すべてのアンテナで同じ受信タイミングになる。しかし、反射波がアンテナ平面に対して直角ではない角度で入射すれば、アンテナごとに受信のタイミング(位相)がずれる。
そのタイミングのずれ(位相差)を調べれば、電波の入射方向は計算できる。横に10個のアンテナが並んでいて、右から左に向けて順に受信した場合に、その間隔が0.001秒の場合と0.005秒の場合とでは当然ながら、入射した受信波の向きは違う。その位相差に基づいて受信波の向きを計算するのもまた、コンピュータのプログラムの問題になる。
つまり、フェーズド・アレイ・レーダーでどちらを捜索するかを決めるのも、反射波を受信するときに時間差に基づいて向きを計算して探知を成立させるのも、コンピュータのプログラムである。そのプログラムにバグがあれば、探知できるはずのものが探知できない、ということも起こり得る。
ルックダウンとシュートダウン
空中に向けてレーダーを使用した場合、何か探知目標があれば反射波が戻ってくるが、何もなければ反射波は戻ってこない。
ところが、地面や海面に向けてレーダーを使用すると、話は違ってくる。航空機を探知しようとしても、その航空機だけでなく、背後にいる地面や海面からも反射波が戻ってきてしまう。それでは、レーダー・スコープは反射波だらけになって訳がわからなくなる。
そこで、本来の探知目標以外から来る邪魔な反射波(クラッター)を排除できないか、ということで知恵を絞った結果、ドップラー効果の利用を思いついた人がいた。
パトカーや救急車がサイレンを鳴らしながら街中を走っていれば、ドップラー効果は容易に体感できる。サイレンの音は、接近してくる時と去っていく時とで異なる音程に聞こえるし、その音程の差は接近/離脱の速度に応じて変わる。
これをレーダーに応用する。地面や海面は動いていないから、それらからの反射波はドップラー効果を生じない。対して、その手前で空中を移動している飛行物体は移動しているから、反射波にドップラー効果を生じさせる。
ただし、レーダーの側も動いていれば、地面や海面からの反射波にもドップラー効果が生じる。それでも、移動している探知目標と、移動していない地面や海面の間には相対的な速度差があるから、ドップラー効果の度合が違う。
そのドップラー効果に起因する、送信した電波と受信した電波の周波数の差(ドップラー・シフト)を割り出すことができれば、その情報を使って、動いている空中の探知目標だけを選り分けられる理屈になる。
これにより、上空を飛んでいる航空機のレーダーを下方に向けて作動させた時でも、自機より高度が低い航空機を探知できることになった。これがいわゆるルックダウンである。また、それを利用して自機より下方にいる航空機に向けてレーダー誘導ミサイルを撃つことをシュートダウンという。
どちらにしても、ドップラー・シフトの割り出しや探知目標の選り分けといった形で計算処理が変わってくる。だから、アナログ電気回路で処理するよりも、デジタル・データにしてコンピュータで処理するほうが確実だし、柔軟な処理ができる。例えば、「速度が極端に遅い探知目標(100km/h未満、ぐらいだろうか)は飛行機ではない」と判断して切り捨てるようなことができる。
ところが最近、これが裏目に出るケースが出てきた。小型の無人機が増えてきたからだ。サイズが小さいのでレーダー電波の反射が少なく、しかも速度が遅いのでドップラー・シフトが少ない。すると、従来と同じロジックで処理したのでは探知漏れになる可能性がある。
だから最近はレーダー屋さんが「小型・低速の目標に強い」とアピールする事例が増えている。その背景には、微妙な反射波、微妙なドップラー・シフトを選り分けるとともに、誤探知を減らす仕組みを取り込んだソフトウェアがある。
対砲兵レーダー
探知・追尾データに基づいて計算処理を行う事例もある。第219回で取り上げた、弾道ミサイルの追尾と着弾地点の割り出しが典型例だが、それとは逆の仕事をする事例もある。それが対砲兵レーダーだ。
対砲兵レーダーとは、敵の砲兵隊が撃ってきた時に、その飛来する敵弾の弾道を追尾して、発射地点を突き止めるレーダーのこと。英語では counter-battery radar というが、battery といっても蓄電池のことではなく砲兵隊のことだ。
弾道ミサイルの飛翔経路算定では「発射地点が既知、そこからの飛翔経路に基づいて着弾地点を予測する」という流れだが、対砲兵レーダーでは逆に「着弾地点が既知、そこに到達するまでの飛翔経路に基づいて発射地点を逆算する」という流れになる。弾道飛行の原理そのものは同じだから、弾道ミサイルの飛翔経路算定と共通する学問を使える。
ただし、火砲の弾道は撃った瞬間の初速と、その時点での向き(上昇角と方位角)によって決定する。それに対して弾道ミサイルは、発射後もロケットを吹かして加速しているため、ロケットが燃焼を停止した時点の速度と向きが分かった時点で初めて、弾道が確定する。まるっきり同じでもないのだ。