2023年2月8日、早稲田大学らの研究グループは、ソーラーパネルの下で協生農法を実現できる遠隔操縦ロボットを開発したと発表した。では、早稲田大学はなぜこのようなロボットを開発したのだろうか。そしてこのロボットにはどのようなメリットがあり、どのようなことを目指しているのだろうか。今回は、こんな話題について紹介したいと思う。
-
早稲田大学が開発したソーラーパネル下農作業ロボット「SynRobo」とは(出典:早稲田大学)

土地環境にとらわれない"協生農法"のメリットと課題
早稲田大学の大谷拓也次席研究員、高西淳夫教授と、東京都渋谷区に本社を構えるサステナジーの共同研究グループは、ソーラーパネルの下でさまざまな植物が混生する農地環境で、移動や種植え、雑草剪定、収穫といった作業が可能なロボットを開発した。しかもこのロボットは、遠隔からの操作が可能だという。
では、彼らはなぜこのようなロボットを開発したのだろうか。それは、ソニーコンピュータサイエンス研究所(ソニーCSL)の舩橋真俊シニアリサーチャーが提言する「協生農法」の大規模な実現を目指したものなのだそう。
この協生農法とは、耕起や施肥、農薬散布を行わず、生物多様性を高度に増進した拡張生態系を構築して食料生産を行う農法のこと。人工的な環境で単一作物を育てる方法とは違い、植物が育つ生態系を段階的に構築することで、さまざまな植物が育っていくという。
この農法は、砂漠化地帯や土壌が荒れた乾燥地帯など農地としての利用が困難な土地であっても、段階的に緑化しながら食料生産を行うことができるため、植物の生育が難しい環境下においてもこの協生農法の導入に向けた関心が高まっている。ただし、そのような従来農法に適さない土地で協生農法を行う場合、導入初期の未熟な生態系を日光や風雨から保護するため、半日陰を形成した上で作業を開始する必要がある。
そして太陽光発電事業の開発や運営を行うサステナジーは、ソーラーパネルの下のスペースが活用されていないことに着目。協生農法をソーラーパネルの下でも導入することができれば、環境問題対策として、緑地化や農作物の生産と、再生可能エネルギーの生産を両立させることができると考えたとする。
しかしその実現には課題があった。生育の時期や速度が異なるさまざまな植物を混生密生させる協生農法では、磁気を問わず種上や雑草剪定、収穫などの複数作業を行う必要がある。だが、こうした複数の作業を連続して行うことができるロボットの開発は行われてきていなかったという。そのため、作業は基本的に人の手に依存することになり、広範囲な農地を対象とすることができなかったのだ。
早稲田大学が作業効率を改善させるロボットを開発!
そこで早稲田大学は、ソーラーパネル下のさまざまな植物が混成する環境下において、移動および種植え・雑草剪定・収穫の作業を行えるロボットを開発した。その名前は、「SynRobo(シンロボ)」。「Syn」には、"人と共に"という意味が込められているとのことだ。
このロボットには、種植え・雑草剪定・収穫の作業それぞれを実現する機構と、重量のある農作物の運搬、種植えのための地面への穴あけなどといった大きな力を必要とする機能を実現する機能を開発し、具備することを目指したとしている。
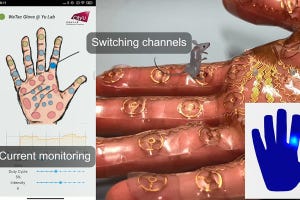
そこで、前後左右の両方向に移動しつつ伸縮するロボットアームや、雑草を刈り取るためのハサミ、そして農作物の把持と切断の両方を行う機構を開発した。種植えでは、植物の種類ごとに形状や大きさの違う種子を同じ機構で扱うため、種子1粒ごとを前もって土でコーティングした"種子団子"を植える機構を開発。さらに、種植え・雑草剪定・収穫の作業においても、ツール位置と操縦者視点を一致させる操縦システム、指定した位置への自動播種機能、初心者も操縦を容易に理解できるメニューインタフェースによるタスク切り替えを実装したという。また、ロボットアームに先端には360°カメラが取り付けられ、植物が密集した中でも広範囲な視野を持てるようにしたとのことだ。
-
操縦システム画面には操縦方法が表示され、植物が密生する環境でも操縦を容易にできるようなインタフェースとなっている(出典:早稲田大学)

併せて協生農法において困難な点として、ロボットと農作物との不用意な接触によって、農作物が生育不良を起こしたり、傷などによる品質や価値の低下を起こしたりしてしまうことがある。SynRoboは、この点にも配慮した設計になっているそうだ。
-
協生農園におけるナス収穫の様子(出典:早稲田大学)

早稲田大学が開発した小型遠隔操縦型農業ロボットは、従来型のロボットと比較して、種植え・雑草剪定・収穫の3作業において、動作時間の49%削減、障害物との干渉率の50%削減を達成したという。
なお、この研究成果は2022年12月21日にMDPI社発行の「Agriculture」誌に掲載されている。
いかがだっただろうか。早稲田大学とサステナジーは、今回開発したロボットを用いて、あらゆる土地で実現可能な協生農法を地球規模で推進していきたいという。さらに、SDGsの目標に掲げられている地球規模の生態系の回復や気候変動の防止に寄与する食料の生産、そしてカーボンニュートラル社会の実現への貢献にも尽力していきたいとする。とてもすごい取り組みだ。