H3ロケット2号機が射点に姿を現した。同ロケットは2月16日、午後3時ころから機体移動を開始。VAB(大型ロケット組立棟)から第2射点(LP2)まで、約400mを30分ほどかけ、ゆっくりと移動した。打ち上げは17日の9時22分55秒に行われる予定。機体移動の撮影時はどんより曇った天候だったが、今後回復し、打ち上げ当日は晴れる見込みだ。
-
射点への移動が完了したH3ロケット2号機

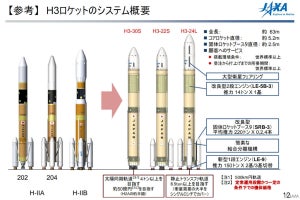
2号機の形態は、初号機と同じ「H3-22S」。第1段の両側に、2本の固体ロケットブースタが付くという、日本ではお馴染みの形だ。通常、先端のフェアリングには搭載する衛星のミッションパッチなどが描かれるが、今回は主衛星が無いので、その代わりに「RTF」(Return To Flight=再開フライト)の文字が入っている。
-
フェアリングに「RTF」(Return To Flight)の文字が見える

現地レポートの1本目の記事に書いたように、今回はH3用の移動発射台「ML5」に、「機体把持装置」が追加されている。2号機では残念ながらまだ使わないものの、ML5のタワーにはすでに設置されており、その状態を見ることができた。
-
VABから姿を現し始めた機体把持装置の後部構造

-
真横からだと、ちょっとよく分からない

-
このあたりから、少し見え始める

-
このリングで、第1段を抱え込む

-
上部側の構造。ブリッジの中心あたりが回転軸のように見える

-
この位置より、機体把持装置の正面側が見え始める

-
ここでは、ドーリーが良く見えるので撮ってみた

-
この写真はドーリーの後ろ側

-
正面側から見たリング部

-
射点に到着すると、前のタワーに隠れてよく見えない

筆者は今回、VABから約350mのプレススタンドで見ていたのだが、思っていたよりも存在感があり、スマートだったML5の印象がだいぶ変わった印象。だが、このメカメカしい感じは、決して嫌いではない。巨大ロボット好きな筆者などは、喜んでそればかり撮りすぎて、ロケット本体よりも枚数が多くなってしまったほどだ。
-
こちらは初号機の時のML5。機体把持装置が付く前だ

-
そしてこちらが今回のML5。比較用に同アングルで撮影した

いつもと同じように、タイムラプス動画を用意した(30分を30秒に圧縮)
この機体把持装置であるが、写真だけだと動きが分かりにくいかと思ったので、ざっくりとした3Dモデルを作り、動きをアニメーションで表現してみた。これは筆者の予想なので、どこか間違えているかもしれないが、写真の巨大な装置が、こんな風に動くのかということを、ぜひ想像してみて欲しい。
機体把持装置の動きを予想して、アニメーションにしてみました
現地レポートの次の記事は、打ち上げ後に更新する予定だ。H3は、日本の宇宙開発の新たな時代を切り開くロケット。ぜひ朗報を届けたいと願っている。
-
初成功がかかる打ち上げということで、種子島には大勢のプレスが詰めかけた

-
取材から撤収後には、西日が差し始めた。快晴の中での打ち上げを期待したい