衝撃的だったH3ロケット初号機の打ち上げ失敗から約1年。ついに、再挑戦の機会がやって来た。打ち上げ失敗後の再開フライトは「RTF」(Return To Flight)と呼ばれ、いつも以上に重要な位置付けになってくるのだが、初号機で失敗したH3の場合は初成功もかかっている。なんとしても成功して欲しいところだ。
マイナビニュースTECH+取材班(今回も筆者1人)は2月13日、種子島に到着。既報の通り、天候上の理由により15日の打ち上げは延期になってしまったのだが、初号機に続き、今回も現地からレポートをお届けするので、続報をお待ちいただきたい。
-
13日の種子島宇宙センターは快晴。ブリーフィングの日は快晴なのに打ち上げ日の天気が悪いので延期という、種子島あるあるが今回も発動です……

機体移動の見所は機体把持装置!(なのか?)
宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は13日、プレス向けの打ち上げ前ブリーフィングを開催。JAXA側からは岡田匡史氏、MHI側からは新津真行氏の両プロジェクトマネージャが出席し、H3ロケット2号機の状況について説明した。
-
JAXAの岡田匡史氏(右)とMHIの新津真行氏(左)

2号機に搭載するのは「ロケット性能確認用ペイロード」(VEP-4)で、初号機と同じ「H3-22S」形態で打ち上げられる。初号機の失敗原因や、2号機のミッション内容については、詳しくまとめた記事があるので、そちらを参照して欲しい。
なお、第1段エンジン「LE-9」については、初号機は2基とも「タイプ1」だったのに対し、2号機ではその1基が「タイプ1A」に変わっている。外から見ても違いは分からないということだったが、確認したところ、正面から見て左手前にあるエンジンの方がタイプ1Aということだ。
-
2号機の仕様。初号機との違いは右の表にある (C)JAXA

今回、延期の理由になったのは天候の問題だけで、機体の準備は全て予定通りに進んでいたという。2月8日には、衛星フェアリングをロケット本体に搭載し、その後、最終機能点検、リハーサル、RFシステム点検まで、正常に完了していた。
-
機体の直前の準備状況。全て順調に進んでいた (C)JAXA

打ち上げ前日の午後3時からは、機体移動が行われる予定だ。前述のとおり、2号機の機体構成は初号機と全く同じ。ロケット側の違いはフェアリングのデザインくらいだが、移動発射台「ML5」は少し改修されており、新たに「機体把持装置」が搭載されているという。
-
打ち上げ前日と当日のスケジュール (C)JAXA

H3ロケットは、H-IIAよりも直径が太いこともあり、風の影響を受けやすい。この影響は、特に推進剤充填前の軽い状態で顕著。機体移動はまさにこの状態で行うため、機体把持装置でロケットの真ん中あたりを抱え込み、風による揺れを抑えるという。推進剤の充填後に、把持を解除し、待避した状態で打ち上げを行う。
-
機体把持装置は巨大なロボットアームである。メカ好きにはたまらない (C)JAXA

機体把持装置は左右のアームで構成され、ML5の左右のタワーに設置。アームは最初、下がった状態になっているが、「前へならえ」の動きでロケットの横まで上げ、そこから半円状のハンドを内側に回転させ、第1段を固定する。まだ搭載していないが、ハンドの内側にはチューブを付け、把持時にはそれを膨らませ、やさしく抱える仕組みだ。
-
MHI新津プロマネが動きを説明。このようにアームを前に出してから、ハンドを内側にクイッと捻る

現在、機体把持装置はML5に装着はされているものの、2号機の機体移動では動かさない。まだ未完成で、今後、システム試験などを行ってから実用化することになるが、主に使うことになるのは「H3-24L」形態だという。
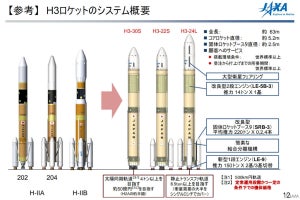
H3のコンフィギュレーションの中で、最もシンプルなのは、ブースタが付かない「H3-30S」形態だ。この状態が最も軽く、風の影響が一番大きそうだが、重いブースタが4本も根元に付いて、安定しているように見えるH3-24Lで機体の把持が必要となるのはなぜなのか。じつは、問題となるのは、固有振動数の方なのだ。
-
H3のコンフィギュレーション。機体把持装置は主にH3-24L用となる (C)JAXA

H3は、機体移動中に風速が15m/s以下という制約条件がある。重いH3-24Lは固有振動数が低く、共振が起きる風速がその制約以下まで下がってしまうのだという。そのままだと、H3-24Lだけ制約条件を厳しくする必要があり、打ち上げの延期が増えてしまう。運用条件を変えないですむよう、機体把持装置を開発した、というわけだ。
前述のように、今回の2号機で機体把持装置は使われないのだが、機体移動で初めて見ることができるので、プレススタンドからしっかり撮影してきたいと思う。