カメラで撮影した映像から、音を復元する技術をご存知でしょうか? スパイ映画に出てきそうな技術が、「SIGGRAPH 2014」で発表されました。「ビジュアルマイクロフォン(Visual microphone)」と呼ばれる技術です。映像のみから音声を復元した結果をまずはご覧ください(動画1)。
映像のみから音声を復元
ビジュアルマイクロフォン技術の概要
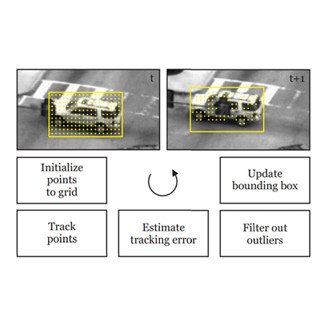
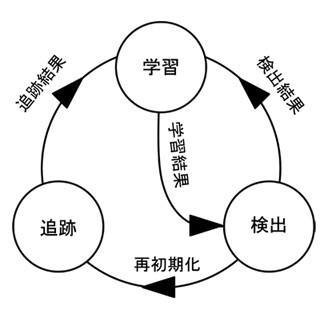
ビジュアルマイクロフォンの概要は図1、図2の通りです。音の振動が物体(ポテトチップスの袋など)に伝わることで、物の表面がごく僅かに振動します。その僅かな振動を映像から抽出することにより、ポテトチップの袋の映像から、音声を復元するという仕組みです。この論文では、ポテトチップスの袋の他に、グラスに入った水、観葉植物の葉、箱ティッシュなどから音を復元することに成功しています。

|

|
|
図1 ビジュアルマイクロフォンの概要1 |
図2 ビジュアルマイクロフォンの概要2 |
音は空気の振動です。音楽のコンサートに行ったことのある方は体感したことがあると思いますが、音の振動は物を震わせます。物の振動を記録すというのが、マイクロフォンの原理です。ビジュアルマイクロフォンも物の振動から音を抽出するという意味では同じですが、肉眼ではまったく見えないほどの微細な振動を映像のみから抽出して音を復元します。初めて論文を目にした時はかなり衝撃的でした!
ビジュアルマイクロフォン技術の特徴
論文によると、音による振動はマイクロメートル(1/1000ミリ)単位です。映像上では数千分の1ピクセル分の微小な変動でしかありません。本連載の第9回「カメラを用いた3次元計測(3) - サブピクセル推定」でご紹介したサブピクセル推定技術では、十分の1、どんなにがんばっても数十分の1ピクセルの精度が限界です。しかし、この論文では画像全体のわずかな色の変化から微細な動きを抽出する手法を用いて音を復元することに成功しており、大変興味深い技術です。
スパイ映画に登場する夢のような技術ですが、音の高周波成分を抽出するためには、1秒に1000フレーム以上を撮影できるハイスピードカメラが必要です。しかし、この論文では、一般的な民生用カメラで撮影した動画から音を再現する試みも興味深い点です。
民生用カメラによるビジュアルマイクロフォン
ハンディカムなどの民生用カメラでは最大でも120fps程度までしか撮影できません。この論文の興味深いもう1つのアイデアは、多くのCMOSイメージセンサで採用されているローリングシャッターの仕組みを利用することです。CMOSイメージセンサは、高解像度化の難しいCCDイメージセンサに取って代わって、ほとんどのカメラ機器で使われています。そして、多くのCMOSイメージセンサは、グローバルシャッターではなくローリングシャッターという方式を採用しています。グローバルシャッターが、全画素同じタイミングでシャッターを切るのに対し、ローリングシャッターでは画像の各行ごとに順次シャッターを切ります。つまり、行ごとに僅かに撮像タイミングが異なるわけです。
ローリングシャッターでは、各行ごとに撮像タイミングが異なるため、動いている物体が歪んで撮像されてしまいます。例えば、直線の物体が曲線として撮影されてしいます。このローリングシャッターのデメリットを逆手にとって、撮像タイミングの異なる各行ごとに振動を抽出することで、サンプリングレートを向上させることができるわけです。この手法により、高速度カメラを用いた場合よりも復元精度は劣りますが、民生用カメラで音を復元することに成功しています。
Computer Visionの多くの技術は、まだまだ人間の目の能力には勝てていませんが、今回ご紹介したビジュアルマイクロフォン技術のように、高周波かつ微細な動きを計測する場合は明らかに人間の能力に優っています。
また、現在の技術力では、高スペックなカメラとレンズを用いない限り、話している内容が聞き取れるほどの音声復元精度は得られません。今後の技術の発展により、携帯電話に搭載されているカメラでも音声を復元できる日がくるかもしれません。ビジュアルマイクロフォンについて詳しく知りたい方は参考文献[1]を読んで見てください!
参考文献
[1] DAVIS, A., RUBINSTEIN, M., WADHWA, N., MYSORE, G., DURAND, F., AND FREEMAN, W. T. The visual microphone: Passive recovery of sound from video. ACM Transactions on Graphics (Proc. SIGGRAPH) 33, 4 (2014), 79:1-79:10.
著者プロフィール
樋口未来(ひぐち・みらい)
日立製作所 日立研究所に入社後、自動車向けステレオカメラ、監視カメラの研究開発に従事。2011年から1年間、米国カーネギーメロン大学にて客員研究員としてカメラキャリブレーション技術の研究に携わる。
日立製作所を退職後、2016年6月にグローバルウォーカーズ株式会社を設立し、CTOとして画像/映像コンテンツ×テクノロジーをテーマにコンピュータビジョン、機械学習の研究開発に従事している。また、東京大学大学院博士課程に在学し、一人称視点映像(First-person vision, Egocentric vision)の解析に関する研究を行っている。具体的には、頭部に装着したカメラで撮影した一人称視点映像を用いて、人と人のインタラクション時の非言語コミュニケーション(うなずき等)を観測し、機械学習の枠組みでカメラ装着者がどのような人物かを推定する技術の研究に取り組んでいる。
専門:コンピュータビジョン、機械学習