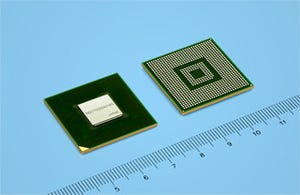
ルネサス エレクトロニクスがサンプル出荷を始めた、第3世代のR-Carシリーズのハイエンド商品「R-Car H3」(図1)は、自動運転を念頭にコグニティブコンピューティングを実現するSoCとしての位置づけを持っている。コグニティブコンピューティングは、将来ドライバーに成り代わりカメラによる自動認識を遅延なく実現するために使う。前方の物体が人かクルマか自転車かという違いを瞬時に判別するだけではなく、クルマだとしても乗用車かトラックか、SUVかなのかも判別する。複数のカメラで撮影した映像をパノラマ風に映し出したり、クラスタや複数のディスプレイに映し出したりすることにも使う。

|
|
図1 R-CarプラットフォームとなるH3。チップ単体のほか、画像のようなSoCのそばにDDR4を4個配置したSiP(Silicon in Package)方式も存在する |
64ビットのARM Cortex-A53/A57コアを採用し、40,000DMIPSという非常にハイエンドなCPUマルチコアを用いるのは、コグニティブコンピューティングだけではなく、車載情報の処理を行い、ドライバーにその結果を的確に通知するためのHMI(Human Machine Interface)処理を行うためでもある。これらのコンピュータ処理を、64ビットのARM v8アーキテクチャ1本で実現できればソフトウェア開発の効率は上がる。さらにこのハイエンドのアーキテクチャをプラットフォームとして用意しておけば、高級車から中/小型の車種と要求仕様に応じて、ハイエンドから下方展開していくことが可能になる(図2)。ミッドレンジ向けのR-Car Mとエントリ向けのR-Car Eというシリーズも計画している。

|
|
図2 H3はR-Carのプラットフォームとして位置づけ、下方展開を可能に (出典:ルネサス エレクトロニクス) |
ルネサスはこれまで、特定用途向けのASSPをR-Carシリーズで実現してきた。車車間通信・車路間通信向けの「R-Car W2R」、車載カメラネットワーク向けの「R-Car T2」、周辺監視向け「R-Car V2H」をリリースしてきた。これらは機能を絞り、それぞれ専用のSoCとしてのR-Carシリーズだった。
今回のR-Car H3は、コグニティブコンピューティング技術を使い、カメラ情報を処理、外部環境を把握し、ドライバーに代わる運転行動計画も算出する。さらに表示板のインテリジェント化により、いろいろな画面をクルマ情報だけではなく、ミラー情報、死角のなくすためのディスプレイ表示、さらにはHMD(ヘッドマウントディスプレイ)のようなフロントガラスにも映し出し、拡張現実(AR:Augmented Reality)という形で表示するなど、時にはクラウドも連携するインテリジェントなHMIを実現する(図3)。ハイエンドからミッドレンジ、エントリへと展開するためのプラットフォームとなる。

|
|
図3 HMIコンピューティングもコグニティブコンピューティングと同じCPUを使いソフト開発を一本化する (出典:ルネサス エレクトロニクス) |
もちろん、安全性とセキュリティも欠かせない。安全設計はISO26262に準拠する設計フローで開発できるようにしてASIL-Bに対応している。もちろん、故障した時は安全性を優先するフェイルセーフの考え方を踏襲する。さらにセキュリティに関してはCPUレベルにセキュアな領域(ゾーン)と通常レベルの部屋からなるARM Trust Zone技術を使う。セキュアなゾーンでは、アクセスする場合に認証を要求するオーセンティフィケーション(認証)をかけており、認証を得たものしかアクセスできない。その認証には暗号化手法を使うと見られ、暗号化エンジンも集積している。
64ビットのARM v8アーキテクチャでCPUを走らせるだけではなく、リアルタイム処理用CPUコアである32ビットのCortex-R7コアも集積しており、それらを電力効率よく動かすためにbig.LITTLE構成を採っている。
GPU回路は2種類、集積し、いろいろな映像を処理するための画像処理を使い分ける(図4)。例えば、ドアミラーやバックミラー、サラウンドビューの画像合成などでは魚眼レンズによる映像が入力されるが、その歪んだ映像をデカルト座標(X-Yの直交座標)に変換して歪を補正する。その後、特徴点を探すが、そのベクトル演算にはルネサス独自のGPUエンジンIMP-X5を使う。ここではパターンマッチングなどの処理を行う。

|
|
図4 GPUを2種類集積。歪変換には専用回路を用いることで遅延を減らしている (出典:ルネサス エレクトロニクス) |
もう1つのGPUはImagination Technologies(IMG)のグラフィックスIPである「PowerVR GX6650」である。これは画像・映像を作成し均一に色を塗る場合のような並列処理に利用する。CPUとIMP-X5で計算した後、ドライバーに表示する場合にはPowerVRを利用して一気にレンダリング処理を行う。
加えて、高速コンピューティング処理にはCPUやGPUとメモリとの高速なやり取りが欠かせない。このためメモリバンド幅を広げるため、LP DDR4 SDRAMをメモリコントローラのすぐそばに置くモジュール構成を採った。従来のR-Car H2シリーズと比べ、メモリバンド幅を4倍の最大50GB/sに広げた。メモリそのものは最新のDDR4 SDRAM-3200をサポートしている。
実装は、図1に示すようにR-Car H3チップの周りにDRAMを配置するモジュールのSiP構造を採っている。メモリサイズごとにシリーズ化することで、コストや性能のカスタマイズを図ることができる。最も手間のかかる高速動作設計をユーザーが行う必要がない。DDRメモリとSoCとの距離を最短としているため、輻射ノイズを削減し、安定な高速動作を確保する。
R-CarシリーズはこれまでのようなASSPアプローチではなく本格的に汎用プラットフォーム的アプローチに代えた。しかもADAS、高精細クラスタ、カメラセンサの多用など安全性を高める機能を搭載することで、ソフトウェアは複雑になる一方だ(図5)。このため、同社はソフト開発や検証などサードパーティのエコシステムを構築してきた。現在173社が参加し、その数は増加し続けているという。

|
|
図5 高機能化と共にソフトウェアも複雑に (出典:ルネサス エレクトロニクス) |
さらにパートナーでもある顧客の持つアプリケーション資産を活かすため、AndroidやLinux、リアルタイムOSなどOSもサポートする(図6)。Green Hills SoftwareやQNXなどのRTOSをはじめ、Automotive Linuxもサポートする。さらにこれまでのR-Carシリーズとのソフトウェアの互換性も保っているという。顧客の要求によっては、これらを統合する仮想化技術もサポートするとしている。

|
|
図6 R-Carのプラットフォームソリューションでソフト開発をサポート (出典:ルネサス エレクトロニクス) |
R-Car H3のソフト開発を迅速に進められるようにハードウェアの評価ボードもすでに製作している。この開発ボードを使ってOSのサポートとミドルウェアの開発などもできるようにエコシステムがある。