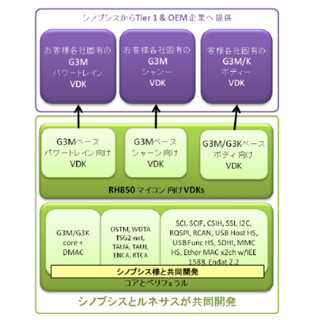
ルネサス エレクトロニクスが先日発表した、運転支援システムのニーズをオールインワンで提供するマイコンの狙いは、制御用のECUを簡単に作れるようにしたことにある。このRH850/P1x-Cシリーズは、安全走行を制御するためのセンシング(検出)、ネットワーク(協調安全制御)、セーフティ(安全機能)、セキュリティ(ハードでデータを堅牢に)という4つの技術を解決する(図1)。つまり、それぞれの機能ごとにマイコンの品種を変えることなく、1つの開発ツールだけでそれぞれのECUを設計できる。

|
|
図1 安心・安全・快適をRH850で実現 出典:ルネサス エレクトロニクス |
センシングは、カメラやレーダーなどのセンサからのアナログ信号をデジタル変換・処理しその情報を元に、クルマの走行状態を制御するのに使う。このマイコンには最大で4コア集積しているが、基本的にはデュアルコアで、冗長構成をとる。自律運転を目指すためには、ミッションクリティカルな制御系は冗長構成が基本であろう。
ネットワーク制御では、従来のCANやFlexRayに加え、高速のEthernetなどのインタフェースも搭載している。例えば、高級車の衝突回避システムでは、カメラからの映像信号と、レーダーからの反射信号を素早く処理するためにはEthernetを使うだろうが、ブレーキをかける場合にはアクチュエータを動かすインタフェースにはFlexRay、ブレーキランプを付けるインタフェースはCANだとすると、それぞれ協調制御が求められる。もはやインタフェースは1種類ではなく、協調しながら動作することが欠かせなくなる。ネットワーク状を流れる信号を制御するためにRH850を使う。
セーフティ機能でも、CPUを二重化し、正常に動作しているかどうかを比較する。ASIL-Dという最も厳しい安全レベルにも対応する。さらにフラッシュメモリや内蔵のバスに流れるデータに対して誤り訂正機能ECC(error checking and correction)を搭載している。
セキュリティでは、ハードウエアセキュリティモジュールを集積、データを暗号化する。また、その際に必要な乱数発生用のコプロセッサも集積している。このハードウエア回路により、クルマのハッキングを防ぐ。もちろん、ソフトウエア上での対策は言うまでもない。
こういったセンシングから車両制御ゲートウエアを経て、ブレーキ制御・ハンドル制御・姿勢制御すべてを1つのマイコンで行うことができる(図2)。

|
|
図2 車載制御を1種類で賄うマイコン 出典:ルネサス エレクトロニクス |
ミッドレンジクラスの制御の利用シーンを示そう。複数のセンサからの入力信号だけではなく、1個のセンサからの信号の場合でも協調制御が求められる。例えば、カメラからの映像を見て、人や自転車などの動く物体を検出し、それらの物体を四角で囲む場合には、映像信号はEthernetで入力し、動く物体を検出し判断する場合にはCANやFlexRayで制御信号として入力する(図3)。制御信号の判断処理ではCPU1を、映像信号処理にはCPU2を使い、それぞれデュアルの冗長構成をとる。4MBのフラッシュとCPUはやり取りするが、ECCで誤り訂正を行う。処理されたそのデータは、ハードウェアセキュリティ回路を経て暗号化され、制御用のアクチュエータを動かすのに、FlexRayやCAN-FDバスを経てアクチュエータ、あるいは次のECUへと向かう。

|
|
図3 CPU1で制御信号からのゲートウェイ・判断機能、CPU2で車体制御を行う 出力はCANやFlexRayでアクチュエータなどを動かす 出典:ルネサス エレクトロニクス |
クルマの画像認識機能を実現するSoCのR-Carシリーズと、このRH850シリーズを接続することで、白線検出や駐車支援、アダプティブクルージングなどの機能を少ない部品点数で実現できるが、ルネサスはこれを実証するためデモ用のクルマを作製した。
記者発表会で見せたデモ(図4)では、先行車を認識するためのR-Carボードと、その情報を判断し、スピードを制御するためのRH850/P1x-Cボードをクルマに載せ(図5)、2つのボードの協調自動追尾システムを動かした。RH850の制御ボードはクルマを止めるブレーキ制御やハンドルの回転の向きによる曲がる動作、クルマを加速する動作を行うために、モータを駆動する。クルマ同士が渋滞時などで衝突しないように制御するものである。
| 動画 | ||
|---|---|---|
|

|
|
図5 物体認識用のR-Carボード(写真左)とRH850ボード(写真右) |
ルネサスは、チップができてからこのデモ用のマイコンのソフト開発をわずか1カ月で終えたという。RH850シリーズだけでいろいろな車載制御を実現するようにしたのは、ソフト開発の負荷を減らしたかったためだとしている。クルマはワイヤレスで外部とつながっており、機能安全を実現するためには従来以上に複雑なシステムを開発しなければならなくなっている。ECUに使うマイコンが同じものであれば、ソフト開発が楽になる。また、システムが複雑になればユーザーがマイコンの仕様を個別に切り出すことが難しくなってくる。だからこそ、エコシステムを充実させ、ソフト開発環境を流用できるようにした。こういったルネサスのプラットフォーム戦略は、クルマ向けのようにシステムが複雑になるにつれ、ますます重要になってこよう。