クルマのECU(電子制御ユニット)が増え、高級車では80~100個、大衆車でも20~40個が搭載されている。これ以上ECUがさらに増えたら、ECUだけではなくワイヤーハーネスなども加わり重量がますます増大化する。これを食い止めるソリューションとしてドメインアーキテクチャが注目されている。
ドメインとは、ECUをいくつか束ねて制御しようという考え方だ。汎用的なドメインアーキテクチャでは、仮想化技術の導入が欠かせない。仮想化は、1台のコンピュータで数台のコンピュータとして使えるように見せかける技術だ。仮想化技術を使って自動運転にも対応できるAdaptive AUTOSARを開発しようという狙いが、11月に提携した日本のコンソーシアム「APTJ(Automotive Platform Technology Japan)」と米国Wind Riverの戦略的な協業である。
-
図1 APTJの代表取締役会長兼CTOで、名古屋大学教授の高田広章氏

APTJの代表取締役会長兼CTOで、名古屋大学教授の高田広章氏(図1)は、AUTOSARが国際標準になっている流れの中で、車載制御システム向けのソフトウェアプラットフォームが海外製だけになるという恐れがあり、名古屋大学におけるコンソーシアム型共同研究(APコンソ)の活動だけでは不十分と認識。2014年ころから共同開発サプライヤやパートナーソフトウェア企業と協議してきた結果、APTJという会社組織を2015年9月に設立した(図2)。
AUTOSAR リリース4.2.2に準拠したソフトウェアプラットフォーム「Julinar」を開発、6社のパートナー企業(ヴィッツ、キヤノンITソリューションズ、サニー技研、東海ソフト、富士ソフト、菱電商事)を通し販売してきた。Julinarを搭載したマイクロコントローラ(MCU)は、2019年~2020年に市販のクルマに搭載される予定だという。
-
図2 APTJにはエコシステムが構築されている (出典:APTJ)

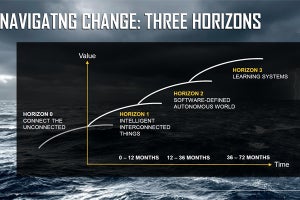
この先にある自動運転システムのためのソフトウェアプラットフォームは、これまでのAUTOSARのままでよいという訳にはいかない。瞬時の判断、レンテンシの短縮などに必要なリアルタイムOS(RTOS)も必要だ。ドメインアーキテクチャによる仮想化技術も必要となる。そこで、高田氏は、自動運転システム向けに「AUTOSAR Adaptive Platform(AP)」というソフトウェアプラットフォームの開発を目指すことに決め、Wind Riverと手を組んだ。
片やWind Riverは、OSベンダーとして、宇宙航空・防衛や工業システム向けのOSとして35年以上の実績を積んできており、通信ネットワークシステムでも20年以上の実績を持つ。RTOSでの市場シェアは36%、商用の組み込みLinuxでは52%、仮想化システムに欠かせないハイパーバイザでは25%と大きな存在感を示している(図3)。
-
図3 Wind RiverはRTOSやハイパーバイザに強い (出典:Wind River)

Wind Riverの最大の強みはやはり、ドメインアーキテクチャに必須の仮想化技術に必要なハイパーバイザとクルマに必要なRTOSの両方を持っているという点だ。ハイパーバイザ技術を中心に、Helix仮想化プラットフォームを持っている。
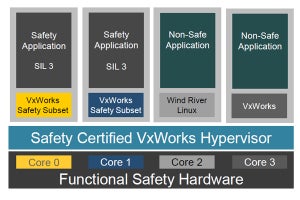
クルマのドメインアーキテクチャ、そして仮想化技術にはSoCが欠かせない。クルマ仕様のマルチコアSoCを物理層として、Helix仮想化プラットフォーム上に組み込みLinuxやRTOSのVxWorks、Androidを設け、レガシーのAUTOSAR Classicも含め、Adaptive AUTOSARを載せていく(図4)。その上にクルマ用のアプリケーションや、ミッションクリティカルなアプリケーションを開発していく。図4が本来の目指す姿となる。
-
図4 Adaptive AUTOSARでSoC、ソフトウェアの進化に対応していく (出典:Wind River)

この構成により、レガシーソフトウェアを再利用でき、AUTOSAR Classicのフレームワークを利用できる。半導体技術の進歩によりマルチコアSoCが進化するが、マルチコアの数が増えても、ソフトウェアの仮想化にも対応する。
-
図5 APTJとWind Riverとの提携 (出典:APTJ/Wind River)

この提携(図5)による成果は、クルマ用のソフトウェアプラットフォームであるAUTOSARと、RTOSやハイパーバイザに強いWind Riverとの協調によって、ECUやドメインの心臓となるSoCやマイコンのこれからの進化にもソフトウェアが対応できるようになることだ。
「APTJはやはり国内のエコシステムであるため、グローバルには弱い。Wind Riverと組むことで、グローバル市場にも出ていきやすい」と高田氏は述べている。また、Wind River側は、「欧州のVectorはNXPやInfineonと組んでおり、APTJはルネサスのCPUにも使われている。AUTOSARのパートナーとしてAPTJと組むことでルネサスとの関係を深められる」としている。両社ともウィン・ウィンの関係になっている。