アストロスケールは12月11日、2024年2月より進めている商業デブリ除去実証衛星「ADRAS-J(Active Debris Removal by Astroscale-Japan)」のミッションにおいて、観測対象のデブリから約15mの距離まで接近に成功したことを発表した。
運用を終了した衛星やロケットなどのデブリは、地上との通信もできず、現在の状況を把握することが難しい。そのため、そうしたデブリへの安全な接近および捕獲を実現するためにも、対象物であるデブリの劣化状況や回転の速さなど、軌道上での状態を把握する必要があり、今回のミッションでは、そうした実際のデブリの除去に向け、安全な接近手法を実証し、手を伸ばせば届く距離までデブリに接近し、その状態を調査することを目的としている。
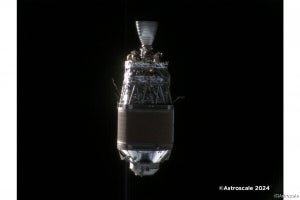
今回のミッションで対象としているデブリはGOSATを打ち上げた「H-IIAロケット15号機」の上段。全長約11m、直径約4m、重量約3トンの大型デブリで、今回の接近は、JAXAのミッション要求とは別にアストロスケールが独自に実施した事業者独自ミッションであり、捕獲運用直前までのRPO(ランデブー・近傍運用)を実証し、将来のミッションに備えることを目的としたものだという。
具体的には、まずデブリの後方50mの距離から、デブリと同一の軌道上を直進し、その後、将来デブリの除去としてその捕獲や軌道離脱も行う次のミッションである「ADRAS-J2(Active Debris Removal by Astroscale-Japan2)」で捕獲箇所として想定している衛星分離部(PAF)の下方に回りこんで接近、最終的には、同ミッションで対象デブリの捕獲運用開始を想定している距離(CIP)にまで接近し、相対的な速度、距離、姿勢を合わせる想定で、実際の運用では、これまでの近傍接近の運用と同様に、搭載センサでデブリの3D形状を高精度で測定し、その動きをリアルタイムで観測。自律的なナビゲーションシステムでそのデータをリアルタイムで処理し、デブリの動きを予測しながら自身の軌道や姿勢を制御しながら段階的に距離を縮めることに挑戦。接近や姿勢制御がこれまで以上に繊細で困難な極近距離において、慎重かつ精密な運用により、予定通りデブリの後方50mからPAFの下方約15mに機体を位置付け、一定の時間、相対的な距離と姿勢を維持することに成功したという。また、その後はADRAS-Jがデブリとの相対姿勢制御の異常を検知し、自律的にアボートを実施しており、最終的にはADRAS-Jはデブリから待避し、安全な状態を保っているという。
なお、このアボートについては、極近距離での運用中でも安全を確保できること、そして軌道上にて設計通りに自律的アボートマヌーバが実施されたことにより衝突回避機能の設計の正しさを再度確認することができたと同社では説明している。
-
対象デブリに接近するADRAS-Jのイメージ (C)Astroscale(出所:アストロスケール)