KDDI、アイサンテクノロジー、KDDIスマートドローン、KDDI総合研究所、ティアフォーは12月6日、災害時の山間部への物資配送の効率化を想定した、自動配送ロボット、自動運転車、ドローンによる協調配送の実証に成功したことを発表した。5社は今後について、2030年をめどに複数のモビリティを組み合わせた全自動の荷物配送サービスの社会実装を目指す。
-
実証に使用したモビリティ

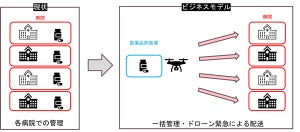
複数のモビリティ連携による自動配送が求められている
国内の物流においては、労働力不足などを背景とする「2024年問題」への対応が喫緊の課題とされる。課題解消に向け、ドローンをはじめ複数のモビリティが互いに協調し、各モビリティの強みを組み合わせて配送する全自動配送の実現が期待される。
-
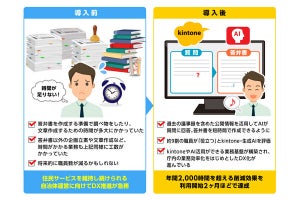
モビリティ連携による配送のイメージ

KDDIらは複数のモビリティの相互運用を可能とする「協調制御プラットフォーム」を開発。2023年3月の実証実験では、自動運転車とドローンをどちらもGNSS(Global Navigation Satellite System)方式を用いた条件で連携し、自動運転車からドローンが離着する実証に成功した。
同年9月には、ドローンはGNSS方式で、自動運転車はSLAM(Simultaneous Localization and Mapping)方式で位置を測定するという、異なる測位方式で連携し自動運転車からドローンが離着する実証に成功。これにより、プラットフォームの連携対象の増加など、利用環境に応じたモビリティの使い分けも可能となる。
-
協調制御プラットフォームを用いた過去の実証

そこで今回、全自動配送の実現による労働力不足の解消を見据え、協調制御プラットフォームを自動配送ロボットにも拡張し、実証に至ったとのことだ。
KDDIはこれまで、自動運転、ドローン、ロボットの各領域で複数の実証を重ねてきた。通信事業に携わる同社の強みである、遠隔監視や運行管理の技術と、その基盤となる通信技術をこれらのモビリティにも応用しているという。
実証実験の概要と新機能のポイント
実証は廃校となった学校を利用したドローンスクール「コードベース君津」(千葉県 君津市)で実施。今回の実証に先立ち、5社は自動配送ロボット、自動運転車、ドローンを協調制御し、最適な合流地点を計算する「統合配送経路計算技術」を開発した。これにより、異なるモビリティが連携して合流地点へ移動できるようになった。
-
統合配送経路計算技術の概要

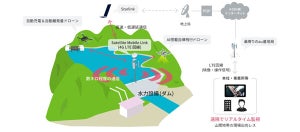
なお、今回の実証においては、自動配送ロボットは緯度経度情報によらないローカル座標系で、自動運転車は緯度経度座標系およびSLAM方式で、ドローンはGNSS方式で、それぞれ位置情報を測定する。
-
今回の実証における協調制御プラットフォーム

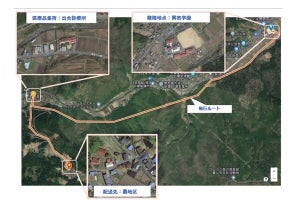
実証のシナリオは以下の通り。まず建物内の店舗で自動配送ロボットに荷物を積み込み、ロボットが建物の出入口まで運ぶ。ロボットの動きに合わせて自動運転車も移動し、最適な場所で合流して荷物を受け渡す。その後、自動運転車はドローン発着ポートまで荷物を運び、ドローンへと荷物を積み込む。ドローンは山の上まで荷物を配送する。
3種のモビリティが協調して荷物を配送することで、物流の労働力不足への対応のほか、災害時などにおける山間部への物資配送の効率化も期待できるとのことだ。
今回開発した統合配送経路計算技術は、配送元と配送先を選択するだけで、各モビリティの最適な合流地点を自動で計算する。特に、ドローンは風向きや飛行距離などに応じて消費電力を抑制するようなルートを導出する。追い風を利用するなど、電力消費を抑制しながら全体の配送時間が最短となるルートを選択するという。
-
統合配送経路計算技術のシステムイメージ