電気通信大学(電通大)は10月10日、植物の成長に伴う物理的な変位と力をロボットのアクチュエータとして活用し、移動や物体の操作が可能な「植物ロボット」を開発したと発表した。
同成果は、電通大大学院 情報理工学研究科 機械知能システム学専攻の村上和也大学院生、同・佐藤操生大学院生、同・久保田百喜大学院生、同・新竹純准教授らの研究チームによるもの。詳細は、多様な分野の基礎から応用までを扱う学際的な学術誌「Advanced Science」に掲載された。
ロボット分野においても、環境への影響を最小限に抑えることが重要とされており、そうした特性をロボットに与える1つのアプローチが、土に還る材料である生分解性材料を採用することだという。特に、自然環境での探査などにおいて事故や故障が発生して機体の回収が困難な状況となった場合、生分解性材料は環境負荷が少ないことからそれらのロボットに適しているといえる。そうした観点では、環境に優しいロボットは探査やモニタリング、輸送、救助といったタスクに適していると考えられるとする。
ただし、ロボットがそれらのタスクを実行するには、ロボットに移動や把持といった能力が必要となるため、機械的な出力を生み出すために必須のアクチュエータをどのように生分解性材料で構築するかがポイントとなる。そこで研究チームは今回、環境に優しいロボット用のアクチュエータとして、枯れれば土に帰る植物に着目することにしたという。
植物をアクチュエータとして利用するというのは、その成長によって物理的な変位が生み出されることから、それを利用するというものだという。また、植物は太陽光や土壌といった自然環境からエネルギーを取得し、そのエネルギーをアクチュエーションに必要な形で変換する能力に優れている。言い換えれば、植物は駆動源の機能を持つアクチュエータと見なすことができると研究チームでは説明するが、植物の動きに関する定量的な研究は限られており、これまで、変位、力、速度などのアクチュエーション特性に関する包括的な解析は行われていなかったという。そのため、植物に基づいたロボットを設計・製作するために必要な知見が不足しているという問題があったとする。
そこで今回の研究では、モデル植物としてカイワレダイコンが採用され、変位、力、および速度の観点から、実験を通してアクチュエーション特性の定量化が行われ、その結果に基づいて、地上を回転移動するロボットとグリッパーの2種類の機体が設計・製作された。
実験の結果、それらのロボットが実際に移動し、物体を持ち上げたり置いたりできることが判明。また、移動ロボットの挙動が、作成された解析モデルの予測値と良く一致していることも確認されたとのことで、このことは植物のアクチュエーション特性を把握することで、植物ロボットの設計や動作の予測が可能になることを示唆しているとする。これらの結果を踏まえ、研究チームでは植物によって動くロボットが実現可能であることが実証されたとしている。
なお、植物は多種多様であり、今回の研究成果を応用することで、これまでにない新しいタイプの、環境に優しく持続可能なロボットがさまざまな形で実現されることが期待されるとしており、雑草が道端で気づかないうちに成長するように、周囲の注意を引かずに着実にタスクを実行する植物ロボットが、生垣といった構造物を自己構築したり、発芽と成長を繰り返したりしながら、自然環境や生態系の保護を目的に活躍する日が来る可能性もあると研究チームは語っている。植物は、長いものでは数十年単位で成長することから、植物ロボットが従来とは異なる時間スケールで動作するシステムであることを意味しており、今後の研究の進展と共に、既存の時空間スケールにとらわれない、新たなタイプのロボットに関する学理の創造も期待されるという。
-
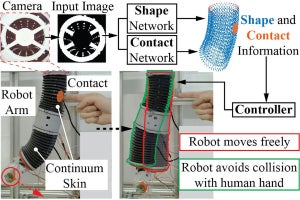
今回の研究の概要 (出所:電通大プレスリリースPDF)