欧州宇宙機関(ESA)と宇宙航空研究開発機構(JAXA)は9月2日、両機関による国際水星探査計画「ベピコロンボ(BepiColombo)」(ベピコロンボとは、水星磁気圏探査機「みお」と水星表面探査機「MPO」が水星到着まで合体した状態の名称でもある)において、2024年4月に発生した同探査機のイオンエンジンの不調を解決できないことから最大出力での噴射ができず、その結果として当初予定されていた2025年12月5日の水星軌道への投入が不可能となったこと、新たな軌道を航行するため、水星到着はおよそ1年後の2026年11月になること、到着が1年遅れても両探査機共に運用に支障は無く、それぞれこれまで通りに科学観測を実施する計画であることを発表した。
-
水星へと向かうベピコロンボ。JAXAの「みお」とESAの「MPO」は合体した状態のベピコロンボとして、水星軌道投入まで道行きを共にし、最終的に分離してそれぞれの探査を行う(C)JAXA/ESA(出所:ESA Webサイト)

また、日本時間9月5日6時48分(欧州中央時間9月4日23時48分)に4回目の水星フライバイ(減速スイングバイ)を行うが(当初からこの日に4回目のスイングバイを実施する予定だった)、ESAによって考案された新たなルートを通り、当初よりも水星に35kmほど近い高度約165kmを通過することも併せて発表された。
ベピコロンボは、2018年10月20日にアリアン5ロケットによって、フランス領ギアナ・クールーのギアナ宇宙センターから打ち上げられた。水星軌道は、平均して太陽~地球間の距離の4割弱の距離にあり、木星や土星などの外惑星に比べればずっと距離的には短いが、その周回軌道に入るのは容易ではない。地球軌道よりも内側へ向かうということは、打ち上げ時の地球脱出速度に太陽への落下速度も加わるが、そのままだと速度が速すぎて水星の周回軌道には入れないため、大きく減速する必要があるからだ。
-
水星到着までの新スケジュール。現時点では、詳細な日程は発表されておらず、2026年11月となっている。このあとの予定の5回目、6回目の水星での減速スイングバイも日程自体の変更はない(出所:ESA Webサイト)

宇宙機の減速(加速)は、大量の燃料を搭載できれば容易だが、現状はそれが難しいため、惑星による減速(加速)スイングバイが用いられる。ベピコロンボの場合は、地球で1回、金星で2回、さらに水星で6回の計9回の減速スイングバイを行う予定。日本時間の9月5日に実施されるのは、水星での4回目の減速スイングバイで、この後、2024年12月1日と2025年1月8日に5回目と最後の6回目の減速スイングバイを行う。
-
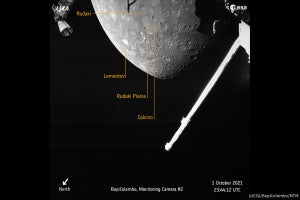
日本時間2024年9月5日6時48分に4回目の水星での減速スイングバイで最接近し、高度約165kmを通過。北極側から南極側へと通り抜けることになる。その際、3台のカメラで撮影が行われる計画だ(出所:ESA Webサイト)

当初は2025年12月5日に到着の予定で足かけ7年強の旅路だったが、今度のコース変更で2026年11月の到着となるため、8年強の旅路となる。この8年という時間をかけると、外惑星なら木星の周回軌道に入れてしまう。太陽~木星間は、太陽~地球間の5倍以上の距離があるが、JAXAも参加するESA主導の木星氷衛星探査計画の探査機「JUICE」は8年で到達する予定(2031年7月の到着予定)。より遠方にある木星の周回軌道に入るのと同等の年数を要することが、水星の周回軌道に入ることの難しさを物語っているのである。
今回のスケジュールの変更は、2024年4月に発生した電気推進モジュール(エンジン部)の電源系に不具合が生じ、イオンエンジンを最大出力で噴射できなくなったことが原因だという。ベピコロンボは、サンシールド内に格納された「みお」、その下にMPO、その下に電気推進モジュールという構成で大きく3つのモジュールで構成される。不具合を調査した結果、電気推進モジュールの太陽電池アレイ(太陽光発電パネル)と、電力を抽出してベピコロンボのほかの部分に分配するユニットの間に予期しない電力消費が確認され、電気推進に利用できる電力量が減少していること判明したのである。そのため、9月2日に出力を下げて運用することが決定。その結果、新たな軌道を通ることとなり(ただし、5回目と6回目の水星での減速スイングバイは同じ日程)、4回目の減速スイングバイでは当初の予定よりも水星に35kmも近い地点を通過することになったのである。これにより、5回目の減速スイングバイ時に必要な推力を減らすことができ、最後の6回目の減速スイングバイにおいて、2026年11月に到着するための新たな軌道に入ることになる。
-
ベピコロンボの構成。「みお」(図中では「Mercury Magnetospheric Orbiter」と表記されている)は、上部の白いサンシールドの中に隠されている。3つのモジュールのうち、太陽電池パドルが1つだけの中段の機体がESAのMPO。その下で、左右に大きな太陽電池パドルを拡げているのが、不調を来してしまったエンジン部分の電気推進モジュール。各挿図は、電気推進モジュールの3台のカメラの画角(出所:ESA Webサイト)

現在、ベピコロンボは「みお」とMPO(と電気推進モジュール)がドッキングしており、上述したように「みお」はサンシールドの内側に格納されていることなどもあり、現時点では搭載機器のすべてを使うことはできない。しかし、全体で16ある観測機器のうち、今回の減速スイングバイでは10個が使用可能だという。メインカメラは今回は使用できないが、電気推進モジュールに搭載されている3機のカメラは使用可能で、最接近から24時間後までの撮影が行われる計画だ(M-CAM1は最接近の12分後から24時間後まで、M-CAM2は最接近の瞬間から2時間後まで、M-CAM3は最接近後の2から12分後まで)。今回は北極側から接近して南極側へと抜けていくコースのために主に南極側が撮影されることになる。そして、9月下旬には全画像が公開される予定としている。