信州大学(信大)は5月8日、エレクトロスピニング技術を使って異なるサイズを持つポリフッ化ビニリデン(PVDF)/ドーパミン(DA)ナノファイバー膜と、超極細PVDF/DAナノファイバーを用いて、高い圧電性能と広い圧力範囲を持った柔軟な「圧電ナノファイバーセンサ」の開発に成功したことを発表した。
同成果は、信大 先鋭領域融合研究群 繊維科学研究所の金翼水教授、同・大学 繊維学部 機械・ロボット学科の施建准教授らの共同研究チームによるもの。詳細は、線維に関する全般を扱う学術誌「Advanced Fiber Materials」に掲載された。
-
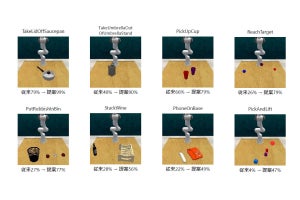
各種センサデバイスとその性能の比較(出所:信大プレスリリースPDF)

これまでのロボットの多くは、指先や掌などにヒトのような繊細な触覚などを備えていないため、髪の毛をつまんだり、針に糸を通したりといった、繊細な動きを滑らかに行うことはできなかった。しかしそれも、ロボットの指や掌などのハンド部に、高い圧電性能と広い圧力範囲を持った接触式センサを実現できると、極めて繊細な動作も実現できる可能性がある。
さらに、そうした高精細なセンサをウェアラブルとして利用すれば、発声、手首の脈拍計測など、ヒトの微細な生理学的活動などもリアルタイムでモニタリングできるかもしれないという。高い圧電性能と広い圧力範囲を持った接触式センサを実現するには、ファイバー圧電材料が望ましいと考えられるが、これまでのそうした材料では、出力電圧が小さかったり、感度は高くても圧力範囲が狭くて極低圧条件でしか性能を発揮できなかったりと、その両方を兼ね備えたものはなかったという。
そこで研究チームは今回、PVDF/DAナノファイバー膜と、超微細PVDF/DAナノファイバーで構成し、連続で均一に分散した二次元トポロジカル構造を備えた高性能な複合ナノファイバー膜である圧電ナノファイバーセンサを、エレクトロスピニング技術により作製することにしたという。
-
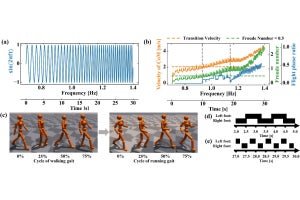
圧電材料のメカニズム(出所:信大プレスリリースPDF)

今回開発された圧電材料は、わずか25×25(625mm2)の面積、圧力1.5Nの条件下で、最大出力電圧は14.3Vが示されたという。センサとしては広い応答範囲(1.5~40N)、弱い力に対する高い感度(0~4N、7.29VN-1)と優れた動作耐久性を備えていることが示されたとした。ナノファイバーセンサに関する従来研究と比較して、低圧力範囲(0~4N)で少なくとも5倍、高圧力範囲(30~40N)で6倍以上の改善が達成されたとした。なお重要なのは、その感度が一部の薄膜材料よりも優れており、セラミック材料のレベルに達しており、感度が高いレベルに維持されたまま圧力範囲が広いという点とした。このことから、広い圧力条件下での応用可能性が示されているとする。
また、わずか1.5N程度で14.3Vの圧電電圧を発生できることから、人体のわずかな動きを収集して電気エネルギーに変換できることが実証され、ナノ発電機として利用できる可能性も秘めているとした。
圧電材料の特性は、外部の機械エネルギーを電気エネルギーに変換できる点だ。材料に圧力がかかると、材料の圧縮により内部構造が移動し、材料表面に電圧が発生する。この圧力が変化すると、材料が発生する電圧も変化する。別の観点から見ると、同じ圧力下で材料がより強く外部の力に反応すると、材料はより大きな電圧を発生することができる。今回の研究ではそれが利用され、二次元トポロジカル構造を持つ複合ナノファイバーが開発された。従来のナノファイバーと比較して、実験とシミュレーションの両方から、同じ圧力条件下で今回の材料の方が性能的に優れていることが確認された。応力プロセスではより大きな変形が発生し、電圧を高めることに非常に役立つという。
-
従来のナノファイバーと今回開発されたナノファイバーの比較。(a)従来ナノファイバーの圧力シミュレーション。(b)今回開発したナノファイバーの圧力シミュレーション。(c・d)今回開発された二次元トポロジカル構造を持つナノファイバーのSEM画像(出所:信大プレスリリースPDF)

今後のIoT社会を表す言葉の1つに「トリリオンセンサ」(トリリオンは1兆の意)があることからもわかるように、身の回りに膨大なセンサが設置され、その重要性が今以上に増していくことになる。しかし現在のセンサの多くは、バッテリー技術に依存する必要があるため、ヒューマノイドロボットのハンド部などへの応用が制限されてしまっている。それに対し、今回の圧電ナノファイバーセンサであれば、フレキシブルなセンサの実現が可能となるとする。さらに、ヒトの動きや微妙な生理学的信号をモニタリングするための柔軟なウェアラブルセンサとしての潜在的な応用も検証されている。今回の研究は、エレクトロスピニングされたナノファイバーをセンサに応用するための新たな道を開く指針になるとしている。