東京大学(東大)大学院情報理工学系研究科と本田技術研究所(Honda)は、ロボットとAIが融合した分野である「ロボット学習」の研究を加速させることを目的とした社会連携講座「スケーラブル・ロボットラーニング」を開設することを発表した。
近年、機械学習とロボティクスの垣根がなくなり、ロボット学習という分野が確立されつつある。AI技術の発達を追い風にロボット開発は日々進化しており、機械学習の技術をロボットに適応させることで、近い将来これまでにはなかったレベルでの自律的な動作が可能なロボットシステムの開発が可能になると考えられるという。
そうした高度な知能を持ったロボットは、人手不足の解消や労働環境の改善などに向けて活用が期待されているが、従来のロボティクスの分野で発展してきた機械設計や制御、最適化といった枠組みだけでは足らなくなっているのが現状であり、深層学習をはじめとする機械学習にも精通した横断的な知見が求められつつあるとのこと。
新たに開設された社会連携講座「スケーラブル・ロボットラーニング」では、そうした社会背景を踏まえ、民間機関と連携することにより、教育研究の進展と充実および人材育成の活性化を図り、学術の推進や社会の発展に寄与することを目的に、Hondaがこれまでに培ってきたロボティクスにおける知見と、東大における強化学習やコンピュータビジョン、自然言語処理に関する知見を融合させ、「自律的にスキルを学習することのできるロボットシステムの開発」に取り組むとしている。
-
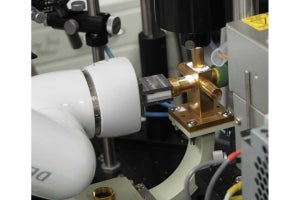
Hondaにて開発中の多指ハンドロボット (2021年に開催されたHondaの研究内容公開の際に編集部撮影)

-
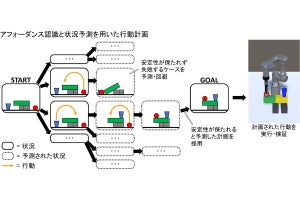
Hondaにて開発中の遠隔操作ロボット (2021年に開催されたHondaの研究内容公開の際に編集部撮影)

また、実際に取り組む研究テーマについては、マルチモーダルなデータを活用した大規模モデルの構築に向けたデータ収集のための枠組み構築や、マルチモーダルなデータを活用するための学習アルゴリズムの開発などを挙げている。
さらに、工場における専門技術を必要とするタスクの知能化など特殊な環境下での動作や特殊なタスクの学習は、能動的な追加データの収集や少ないデータからの動作を適応させる必要があり、大規模データだけでは解決することのできない課題も多くあることから、少数データによる動作の適用などを含め、繊細な手先の動作を必要とする操作ロボットを主な対象とし、Hondaで開発中の多指ハンドロボットおよび遠隔操作システムを基に研究開発を進め、既存の強化学習の問題点を解決する方法論の開発を目指すともしている。