東北大学は1月22日、刺激に対して身体が自動的に反応するヒトの神経系である「反射制御」に基づいた制御に着目し、人間の筋肉や骨格の動きを数学的にモデル化した「筋骨格モデル」を用いたシミュレーションにより、速度可変な歩行を再現することに成功したと発表した。
また、観測値との二乗誤差が最小となる関数を見つけ出す「最小二乗法」を拡張した最適化アルゴリズムを開発し、広範な速度域でより省エネな歩行を実現できる神経回路モデルを構築。それを用いた解析の結果、反射制御において脚が地面から離れている状態である「遊脚」の振りを促進・抑制する筋肉を制御する神経回路が、省エネ歩行の重要因子であることを明らかにしたことも併せて発表された。
-
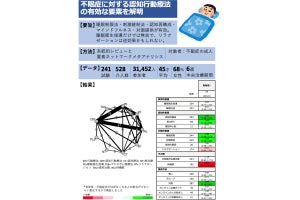
入力される目標速度に応じて、ヒトを模した筋骨格モデルが歩行速度を変化させるシミュレーション。既存の反射制御の枠組みでは、正確に歩行速度を変えることはできなかったという(出所:東北大プレスリリースPDF)

同成果は、東北大大学院 工学研究科の古関駿介大学院生、同・林部充宏教授、同・大脇大准教らの研究チームによるもの。詳細は、計算手法の適用を通じたあらゆるスケールの生命システムに関する研究の全般を扱う学術誌「PLoS Computational Biology」に掲載された。
ヒトは、状況に合わせて歩行速度を調節して効率良く歩くことが可能だ。しかし、このような広範な速度域の省エネ歩行を生成するメカニズムについては、まだ十分に理解されていないという。より理解を深めるための有効なアプローチの1つが、ヒトの歩行を「創る(再現する)」ことによって、そのメカニズムを理解することだ。実世界を近似し再現することが可能な物理シミュレーションや実世界のロボットを用いて、どのような運動が再現されたかを解析する構成論的アプローチによって、ヒトの歩行生成メカニズムを探ることができる。
そこで研究チームは今回、ヒトの歩行生成に重要な役割を果たす反射制御に着目。シミュレーション上で、ヒトを模した筋骨格モデルを用いて歩行を再現することによって、広範な速度域の省エネな歩行に重要な神経回路を明らかにすることを目指したという。
これまでの研究により、ヒトを模した筋骨格モデルを用いて、自然な歩行を再現できる反射制御の枠組みが提案されている。しかし従来の反射制御の枠組みでは、再現される歩行の速度は一定であり、目標速度に従って正確に歩行速度を変えることができないという課題を抱えていたとのこと。そこで今回の研究では、広範な速度域の歩行を実現する神経メカニズムを解明するため、入力される目標速度に応じて歩行速度を調整できる反射制御の拡張を行ったという。
さらに、より省エネな歩行を再現する神経回路モデルを構築するために、最小二乗法を拡張した新たな最適化アルゴリズム「PWLS」が開発された。最小二乗法では、データとの二乗和誤差が最小となる曲線が求められるのに対し、PWLSでは各データ点に重み(評価値)を定義することで、その評価値を考慮した重み付き二乗和誤差が最小となるような曲線が求められる。これにより、エネルギー効率のよい歩行を生成したデータの評価が高くなるよう、各データ点に重みを与えて関数を求めることによって、より省エネな歩行を生成する神経回路モデルを構築することが可能となるとする。
-
提案された最適化アルゴリズム(PWLS)の概要図(出所:東北大プレスリリースPDF)

研究チームは上述した手法により構築された神経回路モデルを用いて、反射制御による広範な速度域の省エネ歩行を再現。そこで再現された効率のよい歩行と効率の悪い歩行を比較することで、遊脚の前方への振りを促進する大腰筋に関する反射回路、遊脚の前方への振りを抑える大腰筋とハムストリングが協調する反射回路の2つの神経回路が、広範な速度域における省エネな歩行に寄与する神経回路であることが明らかにされたという。
-
特定した反射制御における広範な速度域の省エネ歩行に貢献する2つの神経回路。1つ目は、遊脚の前方への振りを促進する大腰筋に関する反射回路。2つ目は、遊脚の前方への振りを抑える、大腰筋とハムストリングに関する反射回路(出所:東北大プレスリリースPDF)

今回の研究で提案された、広範な速度域の省エネ歩行を再現することができる反射制御の枠組みは、ヒトの歩行生成において重要な役割を果たす反射メカニズムに関する将来の研究に大きく貢献できることが期待されるとのこと。さらに、生物の制御を模倣した、広範な速度域を省エネで歩くことができる二足歩行ロボット、より適応的に歩行や動作をサポートすることができる義足や、パワード(アシスト)スーツへの制御への工学的応用が期待されるとしている。