宇宙航空研究開発機構(JAXA)は1月20日、小型月着陸実証機「SLIM」の月面着陸を実施。着陸後に太陽電池の発電ができなくなるというトラブルはあったものの、探査機からの電波は正常に受信できており、日本初の月面着陸をついに実現した。これは日本の宇宙開発において、非常に大きなマイルストーンになったと言えるだろう。
-
SLIM着陸直後のサブ管制室内の様子 (C)JAXA

筆者は前日22時より、JAXA相模原キャンパスにて取材を開始。本記事では、そのときの様子をレポートしたい。
-
開場の30分前に現場に到着したのだが、すでに大勢の報道陣が

-
プレスセンター内部の様子。筆者は右側最前列を確保できた

ライブ配信された月面降下中のSLIMのテレメトリ画面
SLIMは同日0時に、最終降下を開始。高度15kmでメインエンジンを噴射して減速し、周回軌道を脱出、月面へと舵を切った。月のような重力天体では、一旦降下を開始すると、途中で中止してやり直すことはできない。これが月面着陸の難しさで、過去も、多くの探査機がこの最終降下の段階で失敗している。
SLIMの最終降下は、前半の「PDM」(動力降下モード)と後半の「VDM」(垂直降下モード)に分かれていて、これはJAXAのライブ配信でも流れていたテレメトリ画面の左上で確認できる。そして探査機が自分で着陸を確認したら、「MLM」(月面着陸モード)に変わるという流れだ。
-
降下開始後の画面。中央下のメーターを見ると、メインエンジンを噴射していることが分かる (C)JAXA

やや余談になるが、このテレメトリ画面、探査機の情報が満載なので、見る側としては非常に嬉しい。メインエンジンとスラスタの噴射状況、角速度の誤差、加速度、推進剤とバッテリの残量など、多くのことが分かりやすくまとめられている。JAXAがここまでの情報を出してくれるのは珍しいが、今後もぜひやって欲しいところだ。
最終降下は、ほぼパーフェクトと思われるほど順調に進んだ。PDM開始時には1kmほどあるように見えた高度誤差も、制御が進むにつれ、予定の軌道(画面の白線)に収束。角速度の誤差も小さく、姿勢は安定している。
ピンポイント着陸はどう実現するのか?
SLIMのメインミッションは、誤差100mのピンポイント着陸である。この高い精度を実現するためには、自己位置の推定を高い精度で行う必要があるのだが、月軌道だと地球のようにGPSが使えないため、これが非常に難しい。
そこで、SLIMは光学カメラによる画像照合航法を導入。IMUによる位置推定だとどうしても誤差が累積して大きくなっていくが、途中に何度か航法カメラで月面を撮影し、地形を見ることで現在位置を把握、その結果から推定誤差をリセットする。これにより、高い精度を維持し続ける、というわけだ。
-
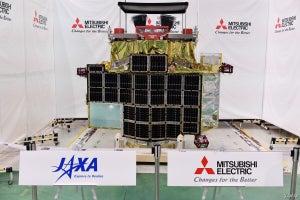
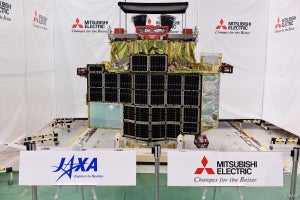
SLIMの外観。PDM時には側面、VDM時には底面側の航法カメラで月面を撮影する (C)JAXA

中継画面からは、画像照合航法の結果までは分からないものの、シーケンスが順調に進行していたように見えるので、おそらく正常にできたのではないだろうか。
-
SLIMの画像照合航法。画像処理でクレータを抽出し、パターンをマップと照合する (C)JAXA

SLIMは15分49秒後ころ、VDMに移行。姿勢を垂直に維持したまま、高度を下げていく。VDMでは途中、高度500m、50m、2mの計3回、ホバリングを実施する。高度50mでは、地表の障害物を検出。岩が無い安全な着陸地点を見つけ、水平移動を行う。さらに高度2mでは、搭載した2台のローバー、「LEV-1」と「LEV-2」(SORA-Q)を放出する。
-
VDM時の画面。高度50mでホバリングを行っている (C)JAXA

月面着陸は成功も、太陽電池が稼働しないトラブルが発生
ここまでは非常に順調だった。しかし、20分3秒後ころ、SLIMはMLMに移行。加速度計も1/6Gを示しており、ここで着陸したものと思われるが、姿勢の表示がちょっとおかしな感じになっていた。
-
右側の画面に注目。ノズルが上を向いてしまっている (C)JAXA

SLIMは傾斜地に着陸するため、ユニークな2段階着陸方式を採用している。これは、接地後にあえて自らを安全な方向(山側)に転倒させるというもの。なので転ぶこと自体は予定通りなのだが、想定とはかなり違った転び方になったように見える。
-
SLIMが計画していた2段階着陸方式。予定通りならこのような姿勢になるはずだが…… (C)JAXA

本来なら、ここで「着陸成功!」ということで拍手でも沸き上がり、最も盛り上がる瞬間だったはずなのだが、状況が良く分からず、待機しているプレスもやや微妙な雰囲気に。ただ、着地後にもテレメトリが届いているということは、探査機が壊れなかったという証拠。この時点で、日本初、世界5カ国目の月面着陸は成功である。
JAXAはこの後、2時10分より記者会見を開催。これによると、月面への着陸は確認したものの、太陽電池が電力を発生していない状況だという。そのため、バッテリ電力のみで運用している状態で、電力を節約するためにヒーターをオフにするなどの対処を行ったが、残量がもつのはせいぜい数時間だという。
太陽の向きの変化にともなって通信が復活する可能性も
JAXA宇宙科学研究所の國中均所長によれば、この時間内で、まず最優先でダウンロードしているのは、ピンポイント着陸に関する航法関連のデータ。これがあれば、探査機がどんな軌道で、どのように判断して降下したのかを、再現することができる。また、SLIMには科学ミッションとして分光カメラを搭載している。これについても、「なるべく早く機能させたい」とした。
この時点では詳しい情報が全く無く、推定するしかないのだが、着陸直前までは正常に機能しており、探査機の他の機器も全て正常であるため、太陽電池だけが突然故障したという可能性は「考えにくい」(同)。
可能性として最も高そうなのは、姿勢の異常だろう。もしテレメトリ画面の状況が正しいとすると、太陽電池はほぼ垂直の状態で、西側を向いていることが分かる。着陸地点は月面の朝のため、太陽は東側から登っている。姿勢推定には誤差がある可能性もあるものの、この画面通りであれば、発電できないという状況に辻褄は合う。
-
この画面は、左半分は北側から、右半分は西側から見た探査機の姿勢を示す (C)JAXA

ただ、もしこの状態ならば、希望もある。月面の正午すぎには、太陽電池に光が当たり始めるはず。太陽の角度が高くなると、今度は高温の問題も出てくるのだが、バッテリが枯渇していても、発電が再開すれば受信機が自動で起動する仕組みになっているそうなので、早ければ1週間以内に通信が復活する可能性もあるかもしれない。
搭載された2台のローバーの分離も成功
なお、2台のローバーの状況については、分離を確認。LEV-1からの電波の受信にも成功したという。SORA-Qは地球と直接通信せず、LEV-1を経由してデータを送るため、LEV-1からの受信データを解析しないと、状況は分からない。この時点ではまだLEV-1から電波が来ていることしか分かっていないのだが、日本初の月面走行も期待したい。
着陸後のSLIMの状況を外側から撮影するというのは、LEV-1とSORA-Qの大きな目的の1つ。まさに今、その写真が最も必要な状況となっているので、画像がちゃんと届いていることを祈りたいところだ。
しかし、もし2段階着陸がうまくいかなかったとしても、SLIMの目的はピンポイント着陸の方なので、その評価には影響は無い。サクセスクライテリアでは、すでにミニマムサクセスは達成。着陸精度の検証には、当初から1カ月程度かかるという話であり、フルサクセスが達成できたのかどうかの判断には、まだ時間が必要だ。
國中所長は今回の結果について、「私は所長なので辛口にせざるを得ない立場だが、ギリギリ合格の60点としたい」と評価。ただそうは言いつつ、「アルテミス計画の活動においても、日本が大きな布石を置けたと考えている。大変大きな一歩だった」と、高く評価することも忘れなかった。
-
会見に出席した山川宏JAXA理事長(右)、國中均JAXA宇宙科学研究所長(中央)、藤本正樹・同副所長(左)。3名とも、会見中は表情が硬かったのだが、なんとか撮った笑顔の1枚

プレスセンターで見かけたさまざまな体験コーナー
ところで、今回のプレスセンターには、SORA-Qの体験操縦コーナーや、SLIMのVR体験コーナーもあり、非常に面白かったので最後に紹介しておきたい。
-
SORA-Qの体験操縦コーナー。ちなみに筆者も、自分のSORA-Qをプレスセンターに持ち込んでいた(笑)

このSLIMのVRシステム、再現度がとにかくすごい。探査機本体の再現度が高いのはもちろんだが、着地点の月面の地形も、実際の高度データを使っているという。あちこちに散らばっている岩石の位置も、観測データから再現しているそうで、もしSLIMが正確にここに降りてきたら、同じ景色が見えるはずだ。
-
VRシステムでは、SLIMの着陸を月面から見ることができた。月面の再現度も非常に高い

-
探査機内部に頭を突っ込んで中を覗くVRあるある。内部のデータは軽量化のために抜かれていて空っぽでした

今回は着陸後のトラブルがあったためできなかったが、順調であれば、実際のテレメトリから噴射のデータを取得し、そのままVRで再現させる予定もあったとか。このシステムは、三菱電機エンジニアリングが開発。もともと広報用に作ったものでは無かったそうだが、ぜひどこかで一般向けにも活用して欲しいと思う。
ちなみに登壇者の背景、SLIMのロゴがなぜか1つだけ『すりむーん』だった