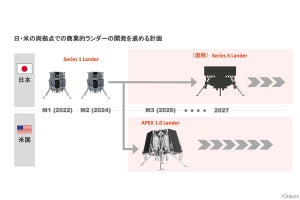
ispaceは11月16日、同社の月面探査計画で2回目の打ち上げとなる「ミッション2」について、開発の進捗を報告した。ミッション2のランダーは前回と同型であるものの、今回は自社開発のローバーを初めて搭載する計画。このローバーは同社の欧州子会社が開発しているもので、今回、その最終デザインが公開された。
-
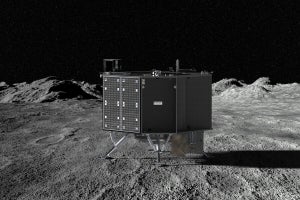
ミッション2のランダーとローバーのイメージCG (C)ispace

ランダーは日本で組み立てを実施
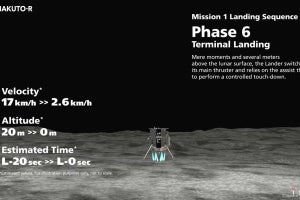
同社は、前回の「ミッション1」において、月面着陸に初めて挑戦。成功すれば、日本初の月面着陸、そして世界初の民間による月面着陸となるところだったが、残念ながら最終フェーズがうまくいかず、失敗していた。
ミッション2では、前回と同じ「シリーズ1」ランダーを使用するが、前回の失敗はソフトウェア側の問題だったため、ハードウェアについては、大きな変更は無いという。
-
ミッション1は、10個のマイルストーンのうち8個まで達成していた

改善したのは検証のプロセスだ。失敗の背景にあったのは、着陸地点の変更後、シミュレーションがやり直しになり、計算に必要な時間を確保できなかったこと。今回、シミュレーション範囲を広げ、より多くのケースで予測を行うほか、着陸地点の変更があっても、当事者レビューを行い、影響を確実にフィードバックするプロセスを制定したそうだ。
これまで、シリーズ1ランダーには特に名前を付けていなかったが、こうした対策が整ったことで、新たに「RESILIENCE」(レジリエンス)と命名。日本語で「再起」「復活」「回復」などの意味があり、同社代表取締役CEO&Founderの袴田武史氏は、「力強いこと、立ち直れること、負けずに真っ直ぐ前に進む性質を表した」と、意図を述べる。
-
袴田武史CEOから「RESILIENCE」という名前が発表された

ランダーのサイズは2.5m×2.3mで、重量は340kg(推進剤無しのドライ時)。ペイロードは30kg搭載可能だ。前述のように、ハードウェアは前回と同様の構成なのだが、今回、大きく変わったのはフライトモデル(FM)の製造体制だ。前回はドイツで組み立て、そこから射点である米国・フロリダに輸送していたが、今回は日本で組み立てを行う。
フライトモデルの組み立ては、2023年9月から、JAXA筑波宇宙センターで実施中。ランダーの推進モジュールは前回と同じくドイツで製造したが、すでに日本に輸送済みで、2024年の春頃に組み立てが完了する見込みだ。ロケットは前回と同じく、SpaceXのファルコン9を使う予定。打ち上げ時期は、最速で2024年冬(Q4)になるという。
-
組み立てられた推進モジュール。複雑な配管が見える (C)ispace

なお、ミッション2の着陸地点については、今回の報告では明らかにされなかった。気になる人も多いだろうが、これについては続報をお待ち頂きたい。
ローバーの新装備はスコップ!
同社のミッション1には、ドバイの「Rashid」、JAXA等の「SORA-Q」という2台のローバーが搭載されていたが、ミッション2では、自社開発のローバーを初めて月へ運ぶ。同社はもともと、Google Lunar XPRIZEでのローバー開発から始まったという経緯があり、「悲願」ともいえる月面走行がついに実現するかどうか注目される。
-
ミッション2ローバー。走行可能なデモ機が公開された

今回お披露目があったのは、ローバーの最終デザインだ。ローバーは4輪仕様で、サイズは高さ26cm(アンテナ含まず)、幅31.5cm、全長54cm、重さは約5kg。Google Lunar XPRIZEで開発したローバー「SORATO」と比べると少し小型化されたが、ほぼ同クラスと言えるだろう。
-
ベールをオープンすると、ローバーが姿を現した

-
SORATOの仕様はこちら。今から6年前に撮影したもの

ボディはCFRP製で、ホイールにはマグネシウム素材が使われている。上部には、展開式の太陽電池パネルを搭載。これは、ランダーへの格納時には天板側に畳んでおき、月面に到着後、バネを使って所定の角度に展開する。この角度を変えることで、月面の幅広い緯度での活動に対応できる設計になっている。
-
太陽電池パネルのヒンジ部。モーターは使わず展開する

-
SORATOのボディは台形だったが、新型はシンプルな直方体に

月面では、太陽電池パネルと同じタイミングで、通信アンテナも展開する。地球との通信は、ランダーを経由して行う。ローバーにはHDカメラが搭載されており、ミッションがうまくいけば、月面からの映像が届くはずだ。なお、今回は技術検証がメインとのことで、科学的な探査は行わないという。
このローバーで注目したいのは、前方に可動式のスコップを搭載することだ。ドリルリグの世界的なメーカーであるスウェーデンEpirocと共同開発するもので、月面では、このスコップを下に降ろして前進し、レゴリスを採取する計画。採取したレゴリスの所有権は、契約により、NASA(米国航空宇宙局)に譲渡されるという。
-
前方に搭載されるスコップ。これでレゴリスを採取する

-
ホイールはSORATOよりも幅が少し狭くなった印象

ただ、所有権を譲渡しても、地球に持ち帰ることはできないため、実効的な意味は無い。これについては、今後活発になると見込まれる月資源商取引のスキームそのものを実証するという意味合いが強いだろう。
ローバーの走行デモ。スコップの動作も見ることができた
ローバーは現在、エンジニアリングモデル(EM)を開発中。環境試験のあと、フライトモデルの開発に移行し、2024年の夏頃にランダーへ搭載する予定だという。
-
ローバーとランダー(モックアップ)の前で撮影に応じる袴田CEO