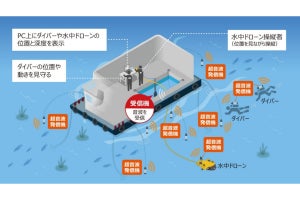
「ALAN(Aqua Local Area Network)コンソーシアム」は10月6日、新会社「アクアジャスト株式会社」を設立したことを発表した。同コンソーシアム発のスタートアップ企業となり、水中環境に適した水中センサロボットをプラットフォームに、水中リアルモニタリングシステムを開発し、水中事業の実現を目指すことになる。
新会社の代表取締役CEOに就く、ALANコンソーシアムの島田雄史代表は、「コンソーシアムでの5年間の活動を通じて、水中環境の定量化やリアルモニタリングの必要性を感じ、今回、世界初の海洋および海中のデータに特化した企業を設立した」とし、「作業性に富んだ新しいコンセプトのセンサロボットにより、日々の事業として、海洋、海中と接しながらデータを収集。同時に光無線通信の必要性を喚起していきたい」とした。
-
ALANコンソーシアムの島田雄史代表(トリマティス代表取締役CEO兼アクアジャスト代表取締役CEO)

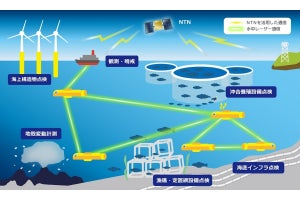
その一方で、「だが、水中光機器だけではどうしても限界があり、音波、低周波電磁波、カメラといった他の技術との組み合わせによって、あらゆる水中環境に対応していくことが必要である。さらに、洋上風力発電を給電だけでなく、通信にも活用し、海洋および海中のリアルモニタリングから始まる新しい世界を提案したい」とも述べている。
-
アクアジャストの事業コンセプト (資料提供:ALANコンソーシアム)

アクアジャストでは、製品およびサービスとして、高度自己位置推定技術などを活用したロボットによる「AquadROBO」、光に加えて、s音波やカメラ、電磁波を駆使し、高精細の3D画像をデータ化して、水質の見える化などを行うモニタリングの「AquadSENSE」、構造物損傷診断や魚介のサイジングおよびウェイング、船底劣化診断などを行うデータ事業の「AquadDATA」、水中光無線通信スポットを構築し、光無線化する通信技術の「AquadLINK」、Ocean Cyber Physical Systemによって、観光や旅行、水族館、スポーツなどを提供する運用およびサービス事業の「AquadPLUS」、エネルギー資源やレアアースの探索、深海生物や海底の調査を行う深海探査の「AquadSEARCH」の取り組みをあげている。
-
アクアジャストの製品・サービス特長 (資料提供:ALANコンソーシアム)

-
AquadROBOのイメージ (資料提供:ALANコンソーシアム)

AquadSENSEのイメージ (資料提供:ALANコンソーシアム)


-
AquadLINKのイメージ (資料提供:ALANコンソーシアム)

-
各サービスのロードマップ (資料提供:ALANコンソーシアム)

まずは、「洋上風力発電システムの水中保守点検システム」と「大型船の簡易船底検査システム」を開発する予定だという。さらに、既存の廉価ドップラー速度計(DVL)と低価格音響測位装置を利用し、2m以下の誤差に収まる海中電磁測位システムを開発するほか、1ノット以下の潮流と波浪下の海中において、位置と姿勢を保持できる外乱対応ロボットの開発、洋上風力メンテナンスロボや船底検査ロボなど、目的や用途に応じた海中ロボットの開発も行う。
今後、投資家への事業計画の説明や資金調達相談を行い、11月には、ALANコンソーシアムのメンバーを含む協力事業会社とともに事業計画を骨太化。ここには、日亜化学工業が参画することが明らかになっている。また、12月には新拠点の立ち上げを検討するとともに、採用活動を開始する。2024年6月以降、シリーズA資金調達を計画し、ロボット開発に着手する予定だ。
ALANコンソーシアムは、日本の企業などが、水中光技術の分野で世界をリードすることを目指し、調査、研究開発の場として、2018年6月に設立。業界の垣根を超えた企業や研究所、大学、高校など、31社/団体が参加。各種ワーキンググループを通じた活動を行っている。IT/エレクトロニクスの業界団体である電子情報技術産業協会(JEITA)が事務局を務めている。
-
ALANコンソーシアム参加企業・団体一覧 (資料提供:ALANコンソーシアム)

超高速海中光ワイヤレス通信の実証実験や、水中LiDARの小型および高速化の開発に成功。CEATEC 2022ではデモストレーションを行ったほか、2022年度から社会実装ワーキンググループを設置し、遊泳中のニジマスを3D計測するなど、光無線技術の実用化に向けた取り組みを行ってきた。
2023年度からは、学会や外部資金獲得などの技術研究に関わる活動を主体とした技術研究ワーキンググループと、社会実装および事業化を目指した技術実装ワーキンググループを新設した。
ALANコンソーシアム実行委員会の森雅彦委員長(産業技術総合研究所 エレクトロニクス・製造領域 領域長補佐)は、「ワーキンググループ活動において、研究開発活動と企業ニーズのミスマッチが生まれ始めていたほか、このほど、新たにALAN発のスタートアップ企業を設立したこともあり、事業化に向けた活動の強化が必要と考えた。そこで、運営方針を変更するとともに、ワーキンググループを新設した。多くの企業などが、コンソーシアムに関わりやすい体制にした」という。
-
事業化に向けてコンソーシアム内にワーキンググループが新設された (資料提供:ALANコンソーシアム)

-
ALANコンソーシアム実行委員会の森雅彦委員長(産業技術総合研究所 エレクトロニクス・製造領域 領域長補佐)

今後は、ユーザー企業の参加を増やすことで、ニーズを共有し、それをもとにした技術開発を促進する一方、光通信技術を海という新たなフィールドに展開したいと思っている日本の企業の参加を期待しているという。
さらに、同コンソーシアムでは、新たに「ALANレポート」をまとめた。
-
「ALANレポート」の表紙と概要 (資料提供:ALANコンソーシアム)

ALANコンソーシアムの活動を紹介するとともに、LiDARや光無線通信、光無線給電などの水中光技術のほか、水中ロボティクスなどの技術動向を伝えるとともに、社会実装に必要なニーズなどの情報を共有。研究開発などの成果を発信することで、社会の理解促進や市場の活性化を図ることを目的としている。
-
さまざまな技術を組み合わせることで水中・海中の新たな経済圏が創出されるとする (資料提供:ALANコンソーシアム)

同レポートでは、水中向け光無線技術を搭載する水中機器の市場規模が、2040年には日本で1兆672億円、世界では26兆3171億円に達すると予測している。
-
水中向け光無線技術を搭載する水中機器の市場規模予測 (資料提供:ALANコンソーシアム)

また、2050年までの応用領域ロードマップや、2040年までの技術・システムロードマップなども示している。
-
2050年までの応用領域ロードマップ (資料提供:ALANコンソーシアム)

-
2040年までの技術・システムロードマップ (資料提供:ALANコンソーシアム)

なお、ALANコンソーシアムは、2023年10月17日から、千葉県千葉市の幕張メッセで開催されるCEATEC 2023に出展する。パルス状の可視光レーザーを用いたLiDARにより、水槽内の模型をスキャンして、立体構造をディスプレイ上で明らかにするデモストレーションや、水中ドローンの展示や操縦体験を行えるようにする。トークステージでは、「ALANが挑む海中ネクストステージ」と題した講演も予定している。
-
CEATEC 2023における展示ブースイメージ (出所:ALANコンソーシアム)

一方、今回の説明会では、同コンソーシアムの会員企業であるトリマティスから、世界初となる水中フュージョンセンサを開発したことが発表された。
-
開発された水中フュージョンセンサのイメージ (資料提供:ALANコンソーシアム)

RGB三色レーザー搭載LiDARとカメラを搭載し、これをハードウェアとして融合。水中のモニタリングで課題となっていた装置構成の大規模化、計測の長時間化のほか、動きが速い魚などがリアルタイムで計測できないといった精度の課題も解決できるという。
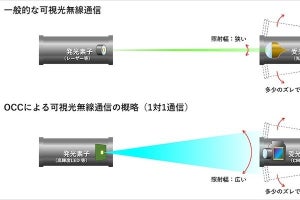
トリマティス 執行役員 技術デザイングループの手塚耕一氏は、「春の紀伊半島の水と、夏の東京湾の水では、通りやすい光の波長が変化する。また、測定対象物の色合いにより反射光量が波長で変わる。水中センサにRGB三色レーザーを搭載することで、季節や海域、対象物ごとに最適なレーザーで計測できるというメリットが生まれる」という。
-
トリマティス 執行役員 技術デザイングループの手塚耕一氏

一方、陸上では自動運転向けに、LiDARとカメラを搭載したフュージョン技術の開発が活発化しているが、陸上では近赤外であるLiDARは、水中では可視域となり、従来手法ではLiDARのレーザー光がカメラにノイズとして重畳されてしまうこと、近赤外カット可視域透過フィルターが利用できないなど、陸上の技術がそのまま海中では使えないという課題が発生している。
トリマティスが開発した水中フュージョン技術では、MEMSミラーを用いてラスタースキャンを行ったのち、そこで発生するLiDAR非計測時間帯にカメラで撮影。1フレーム内において、RGB_LiDARとRGBカメラの両方で計測できるようにすることで、実質的にリルタイム計測を実現した。さらに、水中透過率と測定物反射率をパラメータとした最適波長選択法も採用したという。
-
トリマティスが開発した水中フュージョン技術の概要 (資料提供:ALANコンソーシアム)

これらの技術により、LiDARで得た3D位置情報にカメラの色情報を付与することができるほか、LiDARの正確な3D計測に加えて、カメラによる認識機能も使用可能になる。また、LiDARの距離情報を用いることにより、カメラの色調改善効果も得られるという。
今回、開発した水中フュージョンカメラの技術に関しては特許を出願しており、2023年11月から、実証実験を開始する予定だ。
開発された水中フュージョンセンサ (提供:ALANコンソーシアム)