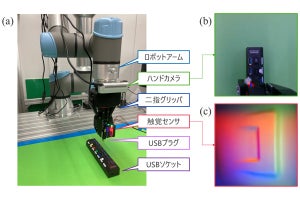
パナソニックホールディングス(パナソニックHD)は8月8日、ロボット制御において、ドアやテーブルなどの環境との接触を含む動作をロボットに教示する際に、教示した動作を正しく完遂するパフォーマンスと、接触時の安全性を両立する制御パラメータを、効率的に学習するという技術を新たに開発したと発表した。新技術は、人とロボットが協働する環境でのロボット利用を加速する。
-
インピーダンス制御パラメータの学習の流れ

同社は、バネのように柔軟な挙動をするロボットを想定し、人がロボットに教示した動作の分節化と、多目的ベイズ最適化で制御パラメータを求める2段階の手法を考案し、従来法に比べて効率的にロボットをプログラムする手法を開発したとしている。
ロボットの動作をプログラムする手法として、人がダイレクトにロボットの動きを教示するダイレクト・ティーチングが現在広く採用されているというが、教示した動作をロボットで再生する場合、モノとの接触がある環境や、人や他のロボットとの協働・分業する環境下では不測の接触リスク(人・モノやロボット自身に損傷を与えるリスク)に対応する必要があり、多様なタスクへの展開が難しいという課題があったとのこと。
一方、ロボットに柔らかい動作をさせる制御技術として、仮想的なバネ系を模倣することでロボットにバネのような柔軟性を与えるインピーダンス制御があり、適切なバネ系のパラメータ(インピーダンス・ゲイン)を設定できれば、教示した動作を正確にこなしながら接触リスクを低減可能という。
しかし、インピーダンス制御では一般的に、安全性と動作の正確さはトレード・オフの関係にあり、両方を同時に最適化するインピーダンス・ゲインの設定が難しいとのこと。 また、タスクの達成のためには連続する複数の動作を正確にこなす必要があるが、動作ごとに最適なインピーダンス・ゲインが異なると同社は言う。
そこで、まずパラメータ最適化が行いやすいよう教示した一連の動作を分節化し、多目的ベイズ最適化により各分節の最適なインピーダンス・ゲインを求める2段階の手法を考案したとのこと。
-
IC-SLDと従来法によるドア開けタスクにおける分節化の結果

前段として今回開発した分節化手法 IC-SLD(Impedance Control-aware Switching Linear Dynamics)は、教示した一連の動作がインピーダンス制御が想定するバネ系の運動方程式の複数の組み合せによって生成したと仮定し、方程式内の未知のインピーダンス・ゲインと方程式の切り替え時刻を推論する問題として定義する。
IC-SLDはこの問題を、予測される軌道と実際の教示軌道の誤差を最小化することで求解するという。従来法と比較し、IC-SLDは最適化に適した分節化を実現した。
-
開発手法のシミュレーションと実機でのインピーダンス・ゲインの学習結果

続いて後段では、事前知識を使用するベイズ最適化によりインピーダンス・ゲインを探索する。
IC-SLDはインピーダンス・ゲインの推定値も出力するため、これを解候補として使用することで最適化を効率化する。事前知識を利用可能なベイズ最適化π-BO [Hvarfner+,ICLR2022]を応用し、タスク性能の指標(報酬関数の累積和)と、安全性の指標(剛性パラメータの累積和)を同時に最適化するインピーダンス・ゲインをロボットの動作試行を繰り返しながら探索する。
シミュレーションおよび実機評価において、今回開発した手法が従来法よりも短時間でインピーダンス・ゲインの学習が可能なことが確認できたとしている。