北陸先端科学技術大学院大学(JAIST)は7月14日、バラの花から着想を得て、ものを包み込むように掴み、かつ汎用性に優れたソフトロボットハンド「ROSE(ROtation-based-Squeezing grippEr)ロボットハンド」を開発したことを発表した。
-
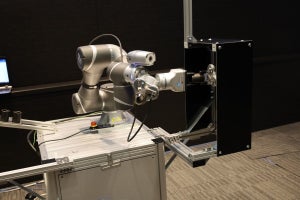
ROSEロボットハンド。(出所:JAIST Webサイト)

同成果は、JAIST 人間情報学研究領域のホ・アン・ヴァン准教授らの研究チームによるもの。詳細は、韓国・デグで7月10日から14日まで開催されたロボットに関する国際会議「RSS 2023」にて同13日に口頭発表された。
農業分野においては収穫作業の自動化が進められているが、農作物を傷つけずに収穫するため、ソフトなロボットハンドが求められている。しかしこれまでのソフトロボットハンドにおいては、イチゴやモモといった特にデリケートな農作物を対象とした把持の結果は芳しくない状況だという。
また、ロボットハンド自体の普及が進んでいるとはいえず、その原因の1つに高価であることが挙げられている。従来のロボットハンドは、対象物に特化した専用タイプとして開発されており、それに加えて、高度なセンシングや制御が必要とされていた。それらが開発コストの高騰を伴うため、結果として価格が上昇していることが考えられるとのことだ。
そこで研究チームは今回、それらの課題を解決するため、“低価格で、収穫物を傷つけない優しい把持が可能で、十分な力を持つロボットハンド”をコンセプトに、新しい農業用ロボットハンドの開発を目指すことにしたとする。さらに、農業だけでなく他分野での活用も視野に入れ、対象物を選ばず、また把持物とその周辺を傷つけずに把持できるロボットハンドの実現が目指された。
具体的な設計概念としては、(1)収穫物を傷つけないためにソフトマテリアルを用いる、(2)ロボットハンドの制御を簡素化する、(3)製作コストを低くする、(4)対象物を選ばず汎用性に優れた把持を実現する、の4点が挙げられた。これらを踏まえ、バラの花の機能と美しさに着想を得ることで、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能が可能なROSEロボットハンドを提案したという。
具体的には、ソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構が提案された。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで、安価に製作することも可能とした。さらに、ROSEロボットハンドは単純な把持のみならず掴む動作も行えるため、把持対象が限定されないとしている。
-
ROSEロボットハンドの設計概念。(出所:JAIST Webサイト)