タカラトミーは4月13日、変形可能な月面ロボット「SORA-Q」(ソラキュー)の市販機である「フラッグシップモデル」を9月2日から発売すると発表した。同日開催された記者発表会には、ゲストとして宇宙飛行士氏の野口聡一氏とデザイナー/アーティストの篠原ともえ氏が登場。実際に操縦し、一足先に月面探査の体験を楽しんだ。
-
「SORA-Q」フラッグシップモデルを持つ野口聡一氏と篠原ともえ氏

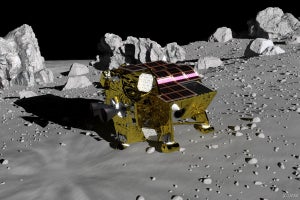
SORA-Qは、同社が宇宙航空研究開発機構(JAXA)らと共同開発した2輪型の月面ローバーである。大きな特徴は変形できることで、月面までは直径約80mmの球状でコンパクトに輸送。月面に放出されたら両輪と尾部を展開し、走行を開始する。早ければ4月26日にも月面に到着する予定で、成功すれば日本初の月面ローバーとなる。
今回発表されたフラッグシップモデルは、このSORA-Qをベースに商品化した1/1スケールモデルだ。月面を走行するフライトモデルとは違いもあるが、同じような変形や、2種類の走行(バタフライ/クロール)が可能で、月面探査を家庭内で疑似体験することができる。操縦はスマホの専用アプリから行い、ゲーム的なミッションも用意されるという。
-
SORA-Qフラッグシップモデル。手のひらにちょうど乗るサイズだ

-
内蔵バッテリはUSBで充電する。このあたりはフライトモデルと異なる

同社キャラクタービジネス本部 AC事業部の赤木謙介部長は、「SORA-Qの本物感を最大限組み込みたかった」と述べる。サイズや形状はほぼ同じ(重さは250g→175gと軽い)。車輪を兼ねる外殻は、アルミ合金を使用している。フライトモデルと同じ位置にカメラを搭載しており、映像を見ながら、遠隔操縦することができる。
-
SORA-Qのサイズや形状をほぼ再現。上部にカメラも搭載している

-
フライトモデルは後方カメラもあるが、フラッグシップモデルではダミー

フラッグシップモデルを手にした野口氏は、「金属の持った感じが国際宇宙ステーション(ISS)にある機械の手触りに非常に良く似ている」とコメント。「宇宙飛行士が触るものは全て面取りされている。これはその面取りの感じが宇宙の製品に近く、そこもすごくリアル」と、宇宙飛行士ならではの感想を述べた。
さらに、「SORA-Qは本来、月面のレゴリス上を走るように作られているので、こういう固い表面は苦手なはずなのに、しっかりと動く」と、エンジニア視点で感心。ちなみに、月面ではレゴリスで空回りするため、その分、車輪を高速に回転させているのだが、フラッグシップモデルは室内専用のため、床に合わせた回転速度に抑えられている。
-
野口氏も篠原氏もフラッグシップモデルの操縦を体験した

メーカー希望小売価格は27,500円。販売目標について問われた赤木部長は、「宇宙の体験を伝える手段として開発したが、顧客のニーズについてはまだ手探り状態で、最初はそれほど多くない数からのスタートになるだろう」と回答。ただ、「短期的な視点では見ておらず、長いスパンで子供達が宇宙に興味を持つきっかけになれば」とした。
-
タカラトミー キャラクタービジネス本部 AC事業部の赤木謙介部長

-
SORA-Qを盛り上げるために、応援ツアーやライブビューイングも計画

記者発表会の会場には、フラッグシップモデルを体験するブースが設けられており、10分間ほどではあるが、操縦を試すことができた。スマホの専用アプリは、左右にスライダーがあり、それで左右の車輪の前進/後進をコントロールする仕組み。両方を上に押すと本体は前進するし、上と下にすればその場で旋回する、というわけだ。
-
専用アプリの画面(リアルモード)。カメラからの映像をそのまま表示

-
ARの月面モードも。カメラの映像は、背景にうっすら表示される

-
専用アプリでは、このような「ミッション」も多数用意されるという

操縦方法としてはスタンダードなスタイルなので、誰でもすぐに慣れることができるだろう。ただスマホでカメラからの映像を見ながら操縦すると、かなり大きく振動するため、酔いやすい体質の人は注意して欲しい。その場合、ARモードにすれば、画面の下半分に月面が表示され、臨場感もアップするのでオススメだ。
カーペットの上を走行するSORA-Q。頑張って進んでいる感じが可愛い
ARモードでの操縦。下半分に表示される月面は全くブレていないのが分かる
リアルモードでの操縦。かなりガクガクするので少し酔いやすいかも
なおSORA-Qは、2回のフライトを予定している。1つめはispaceの「HAKUTO-R」ミッション1ランダーに搭載。これはJAXAの「LAMPE」(Lunar surface data Acquisition Mission for Pressurized rover Exploration)ミッションとして実施されるもので、将来の有人与圧ローバーの開発に必要な月面のデータを取得することを目的としている。
-
この名称には、「将来の月探査ミッションに灯りをともす」という意味も

もう1つはJAXAの小型月着陸実証機「SLIM」である。SLIMには2台のローバー「LEV-1」「LEV-2」が搭載されるのだが、このLEV-2がSORA-Qだ。こちらは、超小型ロボットによる探査技術の実証が目的で、着陸点周辺を撮影し、SLIMの着陸状況なども調べる。LEV-2のSORA-Qには、自律機能が組み込まれているという違いがある。
-
SLIMでのミッション。打ち上げは2023年8月以降を予定している

SORA-Qは、JAXA宇宙探査イノベーションハブのRFP(研究提案募集)にタカラトミーが応募したことで、研究開発がスタートした。この取り組みは、民間の優れた技術を宇宙に活用するだけでなく、その成果を事業にフィードバックすることも狙い。今回のフラッグシップモデルの商品化も、この成果を活用したものだという。
-
宇宙探査イノベーションハブについて説明したJAXAの平野大地氏