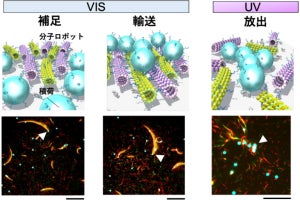
東北大学は3月27日、人工的な多細胞体から分子ロボットを作るための新手法として、脂質をコーティングしたスポンジから直径200μmほどのミクロな液滴をしぼり出し、その液滴が水面で次々と集合・連結することで、全長3cmほどの天然の多細胞組織の形状に似た多区画構造を作るという方法を開発したことを発表した。
また同手法では、実際の生体組織のように異なる区画を隣接させることも可能で、さらに磁性ナノ粒子を含有させることで、構造体を外部から磁場により制御可能であることも併せて発表された。
-
(左)単細胞型分子ロボット(従来型)。(右)今回の多細胞型分子ロボットのイメージ(出所:東北大プレスリリースPDF)

同成果は、東北大大学院 工学研究科 ロボティクス専攻のアーチャー・リチャード・ジェームズ特任研究員、同・野村慎一郎准教授らの研究チームによるもの。詳細は、インタフェースが構造と機能を支配するシステムと材料の科学と応用に焦点を当てた学術誌「Langmuir」に掲載された。
分子ロボットを作るには、ボディ、センサ(感覚装置)、プロセッサ(計算機)、アクチュエータ(駆動装置)のすべてを分子間の相互作用に基づいて構成する新しい技術が必要だ。研究チームではこれまで、人工的にデザインしたDNAの回路やデバイス、タンパク質、酵素、分子モータ、脂質分子などを使った、人工細胞とも呼ばれる「細胞型の分子ロボット」の研究を進めてきたとする。
これまでの分子ロボットでは、個々に独立した単細胞型の構造が目指されてきた。しかし1種類の人工細胞では、求められる機能すべてを導入することは困難だという。また、その製造にも観察にも専門的な装置と技術が必要で、収率も高くないという課題を抱えていたとする。
ロボットの最も基本的な要素として重要なのが、センサ・プロセッサ・アクチュエータを統合して保持するボディだ。そのボディがあることで、装置の構成に秩序を与え、保護し、現実世界での具体的な行動が可能になる。しかしボディの構造が微細で複雑になると、その製造工程も複雑になり、特に溶液環境ではサイズが小さくなるほど乱雑さが増し、各部品の正確な位置決めが困難になる。
この問題に対する解決策は、ユーザが制御せずとも、自然に望ましい形状に整列する部品を使うことだという。そこで今回の研究では、リン脂質と合成界面活性剤を疎水性スポンジに塗布した材料を使った、簡単な自己組織化技術を開発したとする。