宇宙航空研究開発機構(JAXA)は11月22日、通信が途絶えていた超小型探査機「OMOTENASHI」について、状況を説明した。同探査機は同日0:54ごろに月へ最接近したが、これまでに通信が回復せず、月面への着陸を断念。これを受け、JAXAは同日、運用異常対策チームを発足し、原因の究明と今後の対応検討を進めていくことを明らかにした。
ラストチャンスまで粘ったものの…
OMOTENASHIは16日15:47(日本時間)、米国の有人宇宙船「Orion」へ相乗りする形で、超大型ロケット「SLS」(Space Launch System)初号機にて打ち上げられた。日本初、そして世界最小サイズでの月面着陸を目指していたが、ロケットから分離後にトラブルが発生。このあたりの経緯については、前回の記事(超小型探査機「OMOTENASHI」は通信が途絶、しかし月面着陸は「まだ諦めず」)を参照して欲しい。
最初の可視で通信を確立したとき、探査機は約80°/sという異常な速さで回転していた。太陽電池パネルに太陽光が当たらない状態であったため、ガスジェットを噴射して回転を止めたり向きを変えたりしようとしたが、電圧の低下により通信が途絶。JAXAは地上からコマンドを送り続け、探査機からの反応を待ち続けた。
以前、小惑星探査機「はやぶさ」も通信が途絶したことがあった。はやぶさは1カ月半ほどで通信が復活し、遅れはしたものの地球に帰還できたのだが、OMOTENASHIが大きく異なるのは、時間的な余裕がまったく無いことだった。
まず、ガスジェットによるDV1を速やかに実施し、月を通過する軌道から、月へ衝突する軌道に変えなければならない。そして、固体ロケットモーターによるDV2により、衝突速度を大きく落とす必要がある。通信が途絶している間も、探査機は刻一刻と月に近づいており、そのタイムリミットには、わずか数日の猶予しかない。
だが、探査機と通信できないことには、どうしようもない。JAXAは、OMOTENASHIの国内局での運用には臼田局を使う計画だったが、ビーム幅がより広い内之浦局34mアンテナに変更するなどして、探査機からの反応を待ったが、電波は受信できず、まずDV1を断念。プランBとして用意していたDV2のみによる着陸を目指すことにした。
-
通信が途絶してからの運用状況(出典:JAXA)

軌道計算の結果、月に最も接近するのは22日0:54ごろで、このタイミングでDV2を実施すれば、月面への衝突速度は事前の想定よりかなり大きくはなるものの、探査機を月面に落とせることが分かった。ここを通過すると着陸のチャンスは無くなってしまうため、JAXAは短時間で実行できるよう、コマンドを用意して待った。
ラストチャンスとなるNASA DSNゴールドストーン局での運用は、21日22:05より開始。しかし、探査機からの反応は無く、0:54を過ぎ、さらに運用時間を確保していた2:00まで待ったものの、電波を受信できなかったため、ここで着陸運用を終了した。
-
ラストチャンス時の運用室での様子(出典:JAXA)

OMOTENASHIが復活する可能性はあるか
OMOTENASHIの状態であるが、今まで電波を受信できていないことから、最初に発見したときの姿勢から大きく変わっておらず、依然として太陽電池に光が当たらず、電源が落ちたままである可能性が高いと考えられている。
OMOTENASHIは月を通過し、現在は太陽を公転する軌道に入っている。探査機はスピン安定の状態のため、回転軸の向きはこのまま維持されるが、公転すると太陽の方向が変わってくるため、いずれ、太陽電池に光が当たり始める。
-
OMOTENASHIの軌道。月フライバイで大きく進路を変え、一旦地球に再接近するが、その後はどんどん遠ざかる(出典:JAXA)

詳細に解析したところ、探査機の向きは太陽の真逆ではなく、45°~50°くらいズレていたという。どちら側に傾いていたかは不明で、それによって時期は変わってくるものの、JAXAによれば、2023年3月ごろから太陽光が当たり始める可能性があるとのこと。光さえ当たれば充電できるので、再起動するはずだ。
同年7月には、最も太陽を向くと考えられ、このころまでには、探査機が復活するものと期待される。OMOTENASHIは今後、どんどん地球から遠ざかるものの、夏ごろまでは通信が届く見込み。今回の着陸断念でOMOTENASHIの運用はしばらく中断するが、復旧次第、各種実験を行う予定だ。
-
OMOTENASHIの長期的な軌道。少なくとも今後10年間は、地球に再び近づくことはない(出典:JAXA)

その1つは、固体ロケットモーターの点火実験だ。これはDV2用の装置であり、点火してももう着陸はできないのだが、日本では初めてレーザー着火方式を採用しており、その軌道上実証には大きな意味がある。関係各所との調整の上、問題が起きないよう、地球から十分遠いところで実施する方針だ。
半年以上に渡る運用は想定外のため、各機器がそれまで正常に動作するかは不安要因なものの、そのほか、地球磁気圏外の放射線計測や、薄膜太陽電池の発生電力確認なども行うことを検討している。
-
今後の運用について。探査機が復活すれば、これらの実験を行うことを検討している(出典:JAXA)

探査機の回転は一度止まっていた?
JAXAは同日、宇宙科学プログラムディレクタの佐藤英一氏(JAXA宇宙科学研究所 宇宙飛翔工学研究系 教授)をチーム長とする、OMOTENASHI運用異常対策チームを設置、活動を開始した。着陸運用が終わったことで、今後は、原因の究明、運用計画の検討、関係機関との調整、などに軸足が移ることになる。
OMOTENASHIに何が起きたのか。通信できた時間が短く、得られている情報はかなり限られているが、佐藤氏は「まずはいま入手できている情報だけで原因を究明し、その段階で報告したい。そこに長い時間はかけない」とコメント。原因究明をできるだけ早く進める意向を示した。
-
OMOTENASHI運用異常対策チームの概要(出典:JAXA)

最大の謎は、なぜ80°/sという異常な高速回転が起きたのか、ということだ。こんな高速回転には大きなトルクが必要で、リアクションホイールの誤作動程度では説明できない。ガスジェットの噴射か、あるいは、何かがぶつかるなどの大きな外乱を受けたか、くらいしか考えられないが、いずれにしても、確たる証拠はまだない。
探査機は、ロケットからの分離後、電源がオンになり、自動で太陽を捕捉する制御を開始する。探査機には、ガスジェットを噴射した履歴が残っており、それは10°/s程度の回転を止めるだけの量だった。これは、「分離時の外乱は最大でも10°/s程度」という、NASA側の説明とも状況が一致する。
-
ロケットへの搭載状況。他にも複数の超小型探査機が相乗りしていた(出典:NASA/Cory Huston)

分離時の回転が速かったとき、探査機は自動でガスジェットを噴射し、回転速度を一定以下にしてから、リアクションホイールに姿勢制御を引き継ぐ仕組みになっていた。OMOTENASHIは発見時、この太陽捕捉モードに入っていたのだが、リアクションホイールでは対応できない高速回転だったため、制御不能に陥っていた。
OMOTENASHIチーム長の橋本樹明氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)によれば、探査機はプログラム上、外乱が一度収まって太陽捕捉モードに入ると、そこから再び大きく姿勢を乱しても、もうガスジェットは吹かないロジックになっていたという。一度ガスジェットで回転を止めた後でまた外乱を受けたとすれば、一応辻褄は合う。
ただ、それを裏付けるデータは何も無い。橋本氏は、「複数のいろんな要因が同時に起こることは考えにくい。なにか1つの要因ですべての事象が説明できることがないとおかしい」と見ており、そういったケースを考えているところだという。
探査機のデータレコーダーは不揮発性メモリなので、電源が落ちたとしても記録は残っている。夏までに通信が復活し、探査機内のデータを読み出せるようになれば、分離後に何が起きたのか、かなり克明に分かるようになるだろう。おそらく、そこで原因の答え合わせができるはずだ。
何がベストな対応だったのか
今のところ、ガスジェットに異常は見つかっていないのだが、少し気になるのは、ロケットから分離した直後の自動制御での動作だ。本来、ガスジェットは可視中にテストして、健全性を確認してから使うのがセオリー。この地上から監視していないタイミングで、何か予想外のことが起きてはいなかったのか。
同じく相乗りで打ち上げられた「EQUULEUS」は、分離時の外乱が10°/s程度であったことが分かっている。EQUULEUSの搭載機器はOMOTENASHIに似ているとのことだが、大きく違うのは、より大きなリアクションホイールを搭載していること。10°/s以上の回転でも抑え込める能力があり、ガスジェットは自動で使わないようになっていた。
本来なら、OMOTENASHIもそうしたかったのだが、中央に固体ロケットモーターが入るため、小さなリアクションホイールしか搭載できなかった。分離時の回転が速かったときは、制御能力が足りず、ガスジェットを使うしかなかったわけで、今後の原因究明が待たれるところではあるが、この違いが、成否を分けた可能性もある。
-
OMOTENASHIの構造。中央の固体ロケットモーターが大きなスペースを占める(出典:JAXA)

なお、OMOTENASHIが見つかったときの80°/sという速い回転であるが、これをガスジェットのレートダンプ制御で止めるには、40分程度もの長い時間が必要なのだという。結局、バッテリ電圧が低下して中断せざるを得なかったのだが、最初からバッテリ電圧はかなり低かったそうで、この時点で、やれることは多くなかった。
このレートダンプ制御は、推力が想定より大きくても制御系が発散しないよう、連続噴射ではなく、「プシュッ、プシュッ」と断続的に吹くようにしていたという。しかし断続的な噴射だと、バルブの開閉回数が増え、余計に電力を消費してしまう。連続噴射であれば、より少ない電力で、短時間で抑えられた可能性はある。
橋本氏は、「たらればになるが、最初からマニュアルで連続噴射していれば、10分~20分くらいで抑えられたかもしれない」と述べる。ただ、軌道上でテストもしていない段階での連続噴射には、リスクもあり、非常に難しい判断だ。それに、連続噴射でも、結局バッテリ切れになった可能性もあり、何とも言えない。
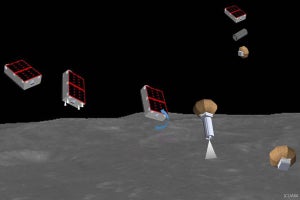
80°/sという回転がいかに速いか、動画にすると分かりやすい。このY軸周りの回転を止めるには、動画で示した位置のガスジェットの噴射が必要。比較用に、最後は10°/sの回転に落としている。このアプリはWEBで公開しているので、試してみて欲しい。
80°/sの速度で回転するOMOTENASHIの再現映像
リスクを取るチャレンジの重要性
月面着陸の断念という結果は非常に残念であるが、最後に1つ強調しておきたいのは、これが超小型探査機であるということだ。
JAXAの通常の科学ミッションであれば、規模は数100kg~数tクラスになり、開発費用も開発期間もそれだけ大きくなる。失敗は許されず、なるべくリスクを抑えた手堅い設計・運用が基本方針となる。しかしそうした大きなミッションだけだと、新しいことに大胆にチャレンジできる機会が減ってしまう。
OMOTENASHIのような超小型探査機であれば、安く・早く開発できるので、「失敗しても構わない」とまでは言わないものの、リスクを恐れず、何度でも挑戦を繰り返すことができる。その成果が大きなミッションに繋がることもあるだろう。宇宙開発の加速には、どちらも欠かせない両輪なのだ。
-
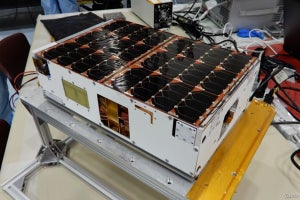
OMOTENASHIの外観。ビジネスバッグくらいの小ささだ(出典:JAXA)

OMOTENASHIには、人材育成という側面もあった。通常のプロジェクトだと、衛星はメーカー側が製造を担当することになるが、OMOTENASHIはJAXAインハウスで開発。若手技術者が実際に開発から運用まで経験するという、貴重な機会となった。この経験は、今後のプロジェクトにおいて、大いに活用されることになるだろう。
しかしその一方で、今回の結果が残念だったのは、そのチャレンジ自体ができなかったことである。OMOTENASHIのチャレンジとは、世界最小サイズでの月面着陸に挑むこと。JAXAの成功基準(サクセスクライテリア)では、着陸実験を行うまでがフルサクセスになっており、着陸に成功するかどうかはオプションの扱いだった。
-
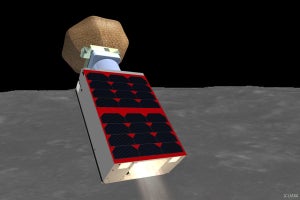
予定していた月面着陸のシーケンス。残念ながら実行できなかった(出典:JAXA)

ただ、超小型探査機は機器の搭載スペースが限られ、信頼性向上のための冗長構成などが組み込みにくいという特有の事情もある。橋本氏は「実験自体ができなかったのは残念」と悔しさを滲ませつつ、「探査機が復帰すればできる実験も残っている。それができるように頑張って行きたい」と、成果の最大化に全力を尽くす意向を示した。