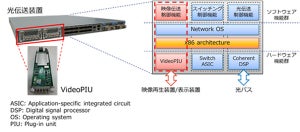
日本電信電話(NTT)は5月30日、信号機を使わないモビリティ実現に向けた全体最適制御のための技術を確立したと発表した。
同社が提唱するIOWN(Innovative Optical and Wireless Network)構想下では、信号機がない街を自動運転車が相互に通信をしながら自律走行し、車同士が衝突せず、全体の移動時間を短縮する未来のモビリティの姿として「シグナルフリーモビリティ」を示している。
シグナルフリーモビリティでは、車群から収集したデータをデジタルツインでリアルタイムに解析して、車同士が衝突せず移動時間を短縮可能な車速や位置を交通全体で予測し最適な交通を制御するのだという。
-
シグナルフリーモビリティのイメージ

同社は今回、デジタルツインを介して、10から20台の自動運転ミニカーをリアルタイムに制御するシステムを構築し、実環境で交通をリアルタイムに全体最適制御する実験に成功した。同社はこれにより、IOWNが示すシグナルフリーモビリティ実現に向けて進展を示したとしている。
今回の研究では、デジタルツイン上の状態予測系のモデル化、およびデータ駆動型でそのモデル学習する方式の確立を目指した。同研究では、各車体をノードで示し、そのつながりをエッジとして構成するグラフを用いて、デジタルツインの状態予測系をモデル化している。時々刻々と変化する複雑な交通制御を単純な組み合わせで表現することがグラフ化の狙いだ。
-
デジタルツインを介した交通制御のイメージ

状態予測に至るまでのデジタルツインの演算は複数ステップに分かれている。デジタルツイン上では、画像データなど実世界で収集されたデータを蓄積して、一定以上の車間距離を保つように斥力を課すための情報を計算して近接車間の通信を介して交換される。その情報を使って衝突せずに目的地点に近づくための各車の状態を予測するという。
なお、この一連の前向きの処理は、各車で実施可能な分散型の演算と近接した車間の通信を繰り返すことで実施できるように設計されている。演算や通信といった処理が分散化されたネットワーク負荷の少ないIoT(Internet of Things:モノのインターネット)機器群の協調制御を体現したとしている。
さらに、状態予測系に含まれる学習可能なパラメータを最適化することで、平均速度を向上させるような効率的な交通制御モデルを構築できる。この2種類のフローはODE(常微分方程式)で表現されており、それを各車の演算や近接車間の通信によって実施できるように分散化することで特殊なニューラルネットワーク(CoordiNet)として定義し、デジタルツインの演算が具体化されている。
-
デジタルツインを介した交通制御における時系列処理を表現したニューラルネットワーク(CoordiNet)

CoordiNetを使って実装したシグナルフリーモビリティのシステムは、予測/制御フェーズとモデル訓練フェーズから構成される。モデル訓練フェーズではデジタルツイン上でシミュレーションを多数回実施し、交通制御モデルを最適化する。実世界にある道路だけでなく、仮想空間上に構築した道路に車の台数や初期位置を変えて配置してシミュレーションを行うことで、さまざまな交通状況を模したデータ収集が可能となる。
このデータを使って交通制御モデルを学習することで、複雑な交通状況でも衝突せずに効率良く走行できるようになると期待される。モデル訓練フェーズは膨大な計算量を必要とするため、非リアルタイム(数時間から1日)で実施する。
一方の予測・制御フェーズでは、学習済の交通制御モデルを使ってデジタルツインとフィードバックしながら実世界の交通を制御する。今回構築したシステムでは、リアルタイム(おおよそ0.1から0.2秒ごと)に各車の状態予測と制御を実施している。
-
シグナルフリーモビリティシステムを構成する2種類のフェーズ