早稲田大学(早大)と日立製作所は4月15日、過去の学習内容と現実との差を認識し、次の行動をリアルタイムに決定・実行可能な、深層予測学習型のロボット制御技術を開発したと発表した。
同成果は、早大大学院 基幹理工学研究科の伊藤洋大学院生(現・日立製作所/早大 基幹理工学部 表現工学科 尾形研究室 客員次席研究員兼務)、早大 基幹理工学部 表現工学科の尾形哲也教授(次世代ロボット研究機構AIロボット研究所 所長/産業技術総合研究所 特定フェロー兼任)、日立製作所の共同研究チームによるもの。詳細は、米科学誌「Science」系のロボット工学に関連する分野全般を扱う学術誌「Science Robotics」に掲載された。
AI技術は日進月歩で進化しているが、まだ想定外な事態まで想定し、すべての状況に対応できる予測モデルを構築することなどは困難である。
そこで研究チームは今回、発想の転換を図り、予測モデルの「不完全性を前提」とし、現実の状況とモデルの予測に誤差を最小化するアルゴリズム「深層予測学習」を考案。ヒトなどの生き物が実世界と脳の予測誤差が最小となるように振る舞うことを説明する「自由エネルギー原理」を参考に開発したという。
ロボットの機械学習は従来、所望の動作を獲得するまで膨大な数の試行錯誤をすることで、ヒトが考えつかない効率的な動作を獲得できるという大きなメリットがあるが、その一方で機械学習に手間と時間を要することが課題だった。
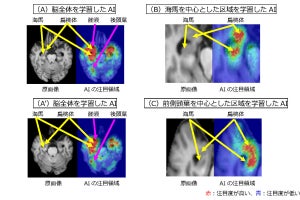
そこで今回の研究では、ヒトが遠隔操作によりロボットに必要な動作を複数回教示し(Step1)、さらに計算機内で数時間学習するだけで(Step2)、所望の動作をプログラミングレスで獲得できる手法を開発。ロボットが作業を実行する際(Step3)、ロボットは視覚運動情報に基づき近未来の状況を予測し、現実との誤差(ギャップ)を最小とするように次の動作を行うということを可能としたという。ロボットが学習時と現実の差を許容しながら、リアルタイムに動作を調整し続けることで、未学習の環境や作業対象物にも対応できる柔軟さが実現されたとする。
-
今回開発された「深層予測学習」は、生体が実世界と脳の予測誤差が最小となるように振る舞うことを参考に、現実とモデルの予測誤差を最小化するアルゴリズムとなっている (出所:早大プレスリリースPDF)