新エネルギー・産業技術総合開発機構(NEDO)と、産業技術総合研究所のベンチャーであるSteraVision(ステラビジョン)は2月21日、スキャナの可動部をなくし、信頼性・安定性・量産性・低価格化を向上させた「ソリッドステートLiDAR」を開発したことを発表した。
同成果は、NEDOの「戦略的省エネルギー技術革新プログラム」において、2019年12月からステラビジョンが取り組んでいる燃費効率の良い自動走行システムの実現に向けた「長距離・広視野角・高解像度・車載用LiDARの開発」によるもの。
LiDARは、レーザー光を照射・走査して対象物までの距離を計測したり、性質を特定したりする光センサー技術であり、モーターやMEMSミラーなどを稼働させ、光ビームをスキャンする方式が主流となっている。しかし、価格低減や、駆動部の削減による故障率の低下、信頼性の向上などのニーズがあり、全固体(ソリッドステート)化が求められていた。
今回開発されたソリッドステートLiDARは、位置を特定せず高速にデジタルスイッチする仕組みと、多ビーム同時走査となるマルチスキャン化を組み合わせ、2波長のビート信号を用いたDualビート方式による長距離高精度測距を採用したほか、前方のシーンから重要な部分を選択的にピックアップして認識する「無意識AI」を取り入れたAutonomous Scanを搭載。これにより、対象までの距離に関係なく光ビームをランダムに切り替え、自動運転に重要なシーンを選択することが可能となったという。
また、従来の光パルスを物体に照射し、物体から戻ってきた光子を検出してその時間差を出す「ToF方式」ではなく、新たに光の波の性質を利用した「FMCW方式」を採用。FMCWのボトルネックであった小型化・高性能化の実現のために、光方向性結合器、Y分岐器など、多くの部品が光集積回路として1チップ化されており、これにより、同時に多くの光ビームをスキャンできるだけでなく、小型化・低価格化も図ることができるようになったとしている。
-
(左)今回開発されたソリッドステートLiDAR。(右)ソリッドステートLiDARのスキャナの動作原理 (出所:NEDO Webサイト)

さらに、従来はLiDARとカメラは独立したセンサであったものが、今回はLiDARによる物体検出とカメラ画像の自動運転車向け認識(パーセプションAI)の融合がなされた。これにより、カメラ画像だけでは検出困難な遠方や“霧の先”の重要な物体を、パーセプションAIの指示のもと選択的にLiDARでスキャンして物体を検出・追跡するという、より信頼性の高い視覚システムとなったとする。
-
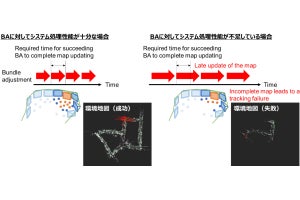
(左)開発されたフォトニックIC。(右)カメラ画像・パーセプションAIと、LiDARを融合させた重みづけスキャンの例。LiDARによる物体検出(上)を3Dカメラ画像(下)と融合させて、パーセプションAIにより認識させている(下の赤枠部分) (出所:NEDO Webサイト)

こうした仕組みを活用することで、選択的に抽出した重要なシーンを計測後すぐにフレームをリフレッシュできるため、一筆書き後にリフレッシュする従来方式と比較して高速で追跡を行うことが可能となったことから、道路や交通状況を把握して早めに対処する「予知運転」の精度向上が果たされることとなり、その結果、燃費向上による15.2%のエネルギー削減につながることが確認されたという。
なお、ステラビジョンでは今後、NEDO事業の中でレベル4(高速道路など、特定の限られた状況下でのみ車両がすべての運転機能を処理)とレベル5(一般道を含むすべての状況下で車両がすべての運転機能を処理)の自動運転や、FA、ロボティクスシステム、セキュリティなど、多くの分野への適用を目指し、予知運転に伴う省エネ化を進めるとしているほか、それら各種分野の顧客ニーズにあわせソリッドステートLiDARの性能をチューニングし、2022年7月ごろからサンプル出荷を進めていく予定としている。
一方のNEDOも、今後も経済成長と両立する持続可能な省エネの実現を目指し、「省エネルギー技術戦略」で掲げるエネルギー・産業・民生・運輸部門などにおける重要技術を中心に、2030年には高い省エネ効果が見込まれる技術について、事業化までシームレスに技術開発を支援していくとしている。