NECは1月27日、ロボットによる倉庫内での搬送作業効率を、高い安全性を維持しながら従来比で2倍に向上させる制御技術を開発したことを発表した。
物流分野における搬送ロボットの活用が進んでいるが、従来は安全性確保のために走行速度を抑える必要があり、生産性向上の足かせとなっていた。今回、NECでは、センサの測定誤差やシミュレーション結果と実際のロボットの動きの差など、ロボット制御における不確かな要素を表現できるモデルと、数理ファイナンスの手法を活用して、安全性リスクに応じてロボットを制御するリスクセンシティブ確率制御技術を開発することで、作業者や床上の物品などの障害物がなくリスクが低い場所では最短距離を高速走行し、リスクが高い場所では確実に回避できる経路を低速走行するなどをロボットが自律的に判断し実行することを可能にしたという。
実際にこれらの技術を適用したロボットと従来のロボットで搬送作業を比較したところ、作業時間が半分となり、安全性を確保しながら搬送効率を2倍向上できることが確認されたという。また、ロボット専用エリアを整備する必要もなく、安全性と効率性を実現できるため、既存倉庫への導入も容易であるともしている。
なお同社は今後、現場での実証実験を通じてさらなる技術開発を進め、協調搬送ロボットへの早期搭載を目指すとしている。
-
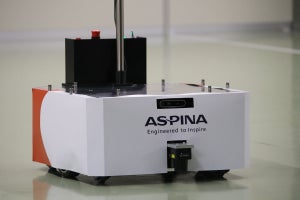
開発した搬送ロボットの制御技術の概要 (提供:NEC)