建設現場のDX(デジタルトランスフォーメーション)・自動化を目指す東京大学発スタートアップのARAVは10月1日、建設機械の自動運転開発検証向けデジタルツインプラットフォーム「Open Construction Simulator」(OCS)の提供を発表した。
-
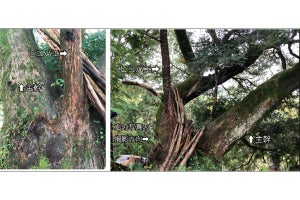
Open Construction Simulatorの開発画面のイメージ

同プラットフォームはField Robotics Japanと合同で開発を進めたもので、今回リリースする「OCS ver 0.5.0」は、油圧ショベル、ダンプトラック、ホイールローダに対応し、基本コンセプトである簡易土砂シミュレーターを内包している。また、センサー機能として、LiDAR、IMU、GNSS、RGBCameraをそろえており、多種多様な建設現場における自動運転に対応可能だ。
-
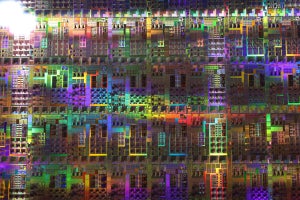
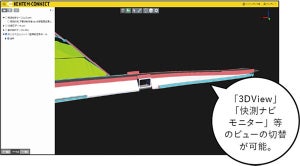
OCS上の地形をLiDARでスキャン。ROS Controlを通じて、rvizに表示している様子

建設機械の自動運転機能を開発する工程では実機を用いての検証方法が主流であり、建設機械を試験動作する際の場所、時間、天気を考慮する必要があり、開発イテレーションを素早く回すことが困難だった。この課題を解決するため、同プラットフォームの開発がスタート。
ARAVはSoftware In the Loop Simulation(SILS)の有用性に着目し、同プラットフォームではSILSにおけるプラント部をUnityベース、コントローラ部をROSで構築することで再利用性を高めた。基本機能はOpen Source SoftwareとしてGIthubに公開されており、ユーザー自身の手で独自のアプリケーション作成が可能となっている。
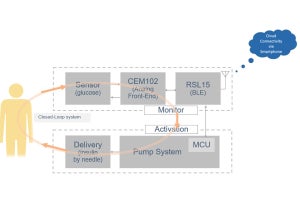
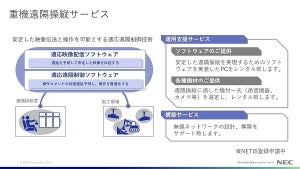
同プラットフォームは標準でゲームパッド入力に対応しているため、ARAVが販売する遠隔建機向け運転席と連携し、建設機械の初級オペレーター向けの訓練用シミュレーターとしても利用できる。
-
訓練用シミュレーターとしての活用イメージ