「2019国際ロボット展」(iREX2019)において、トヨタはヒューマノイドロボット「T-HR3」のデモを行っていた。T-HR3は、前回(2017年)の国際ロボット展で初公開された遠隔操縦型の2足歩行ロボット。人間が搭乗する「マスター操縦システム」が改良されており、よりリアルな操縦が可能となっている。
-
トヨタのヒューマノイドロボット「T-HR3」。遠隔操縦を行っている

T-HR3は、同社の第3世代ヒューマノイドロボット。身長は154cm、重量は75kgで、全身に32軸+10指の自由度を持つ。独自のトルクサーボを開発しており、関節を柔軟に制御することが可能となっている。
大きな特徴は、マスター操縦システムにより、まるで自分がロボットに乗り移ったような感覚で操縦できることだ。ヘッドマウントディスプレイは、ロボット頭部のカメラと連動。腕を動かす「マスターアーム」は、ロボット側の反力も感じられるバイラテラル制御になっており、物体を持った感覚までリアルに感じることができる。
T-HR3の遠隔操縦デモ(1)。操縦者とロボットが同じように動いている
前回からの改良点は、大きく2つ。1つは、指を動かす「マスターハンド」を追加したことだ。従来は、データグローブで操作のみ行っており、反力のフィードバックはなかったが、サーボを使ったマスターハンドにしたことで、マスターアーム同様のリアルな感覚での操縦が可能となった。
-
新搭載したマスターハンド。小指以外の4本の指で操作している
-
2年前はデータグローブだった。操作はできるがフィードバックはない


もう1つは、「マスターフット」により、ロボットの歩行を操作できるようになったことだ。マスターフット(靴)に搭載されたセンサーにより、人間の足の動きを検知。歩行に近い直感的な操作によって、ロボットを歩かせることが可能だ。なお、ロボット本体については、大きな変更は行っていないそうだ。
-
マスターフット。靴に動きを検知するセンサーが取り付けられている

同社ブースでは、いくつかのデモで機能を紹介。中でも圧巻だったのは、T-HR3がバーテンダーになるというデモだった。氷(を模擬したもの)をつまんだり、シェイカーの蓋を閉めたり、バーテンダーの一連の作業は非常に細かい。指の反力を感じられるマスターハンドでなければ、難しかった動作だろう。
-
柔らかいボールを持つデモ。反力のフィードバックが無いと難しい
-
力覚のみで迷路を解くデモ。見えないようロボットには目隠しも


-
T-HR3がバーテンダーに。小さい"氷"を器用につまみ上げる
-
カクテルを出した後、最後に花を出すマジックまで披露していた


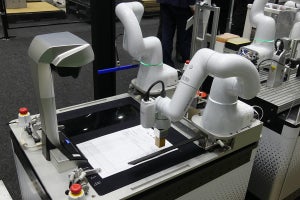
T-HR3の遠隔操縦デモ(2)。バーテンダーの細かい作業を実現している
またマスター操縦システムは、T-HR3以外のロボットの操縦も可能だ。デモでは、東京オリンピック・パラリンピックのマスコットロボット「ミライトワ」と「ソメイティ」を動かす様子を披露。T-HR3とは関節の構成が大きく異なるものの、同じように動かすことが可能となっていた。
T-HR3とミライトワ/ソメイティの連携。3体のロボットを同時に操縦できる
同社はT-HR3を、人間の生活をサポートするパートナーロボットとして開発した。まだ研究開発の段階のため、今後、ビジネスとしてどう展開していくかは決まっていないものの、将来的には、家庭、医療機関、災害地、建設作業、宇宙など、幅広い分野への応用を視野に入れているとのことだ。