英国の宇宙企業Spacebitは12月10日、都内で日本初開催となる交流会を実施。同社が開発を進めている月面ローバー「Asagumo」(朝蜘蛛)のプロトタイプを公開した。重力天体のローバーというと普通は車輪やクローラを考えるものだが、このAsagumoはなんと4足型。これが実現すれば、月面初の"歩く"ローバーとなるだろう。
-
英Spacebitの「Asagumo」。前代未聞の4足型月面ローバーとなる

Asagumoは、米Astroboticの月面ランダー「Peregrine」に搭載され、2021年に打ち上げられる予定。同じフライトには、日本のローバー「YAOKI」の搭載も決まっており、打ち上げが遅れなければ、それぞれ英国初、日本初の月面ローバーとなる可能性がある。今回、両者からは、今後、技術・運用で協力していくことも明らかにされた。
なぜ4本足なのか?
Asagumoは、重量わずか1.5kgという超小型ローバー。3軸の脚を4本搭載し、まるで蜘蛛のように歩く仕組みだ。このAsagumoという名前は、同社ファウンダー/CEOのPavlo Tanasyuk氏が来日した際、「朝の蜘蛛は福が来る」という言葉に感銘を受け、決めたとのこと。おそらく月面の"朝"に着陸することになるだろうから、ピッタリな名前である。
-
英国のローバーなのに、日本語で命名。なんとも風流な名前である

ローバーのボディは、1Uサイズ(10cm角)。月面と地球低軌道では、重力やレゴリスの有無など違いもあるののの、超小型衛星の技術をベースに作られているという。Asagumoは、1Uキューブサットに脚が生えたもの、といえるかもしれない。なお本体とは別に、分離機構も用意して搭載するとのこと。
今回公開されたものは地上試験用のプロトタイプ。残念ながら、実際に歩行するところは見ることができなかったが、本体正面にフルHDカメラ、正面と左右にLIDARセンサーを搭載していることが確認できた。これで、月面の撮影や、溶岩チューブ内の3D計測が可能になるという。
-
本体はまさに1Uキューブサット。小さい方がカメラ、大きい方がLIDARだ

多脚ロボットは、地上ではそれなりの種類があるものの、月面では前例が無い。車輪やクローラに比べると、アクチュエータの数が増え、システムが複雑になりやすい。故障のリスクや重量の問題など、「採用しない理由」はいくらでも思いつくが(だからこそ前例が無いのだろう)、なぜ4足にしたのか。
-
足はピッチ軸が2つにヨー軸が1つという構成。合計12個のモーターを使う

おそらく何百回も同じことを聞かれているだろうが、スルーもできないのでTanasyuk氏に質問したところ、「走破性能の高さ」を理由として挙げた。「溶岩チューブの中は岩が多く、車輪だと進みにくい。かといって足が6本だと重くなりすぎるので、バランスを考えて4本を選んだ」という。
またTanasyuk氏によると、足の先端にセンサーを付け、水の探索を行うことも検討しているそうだ。多脚であれば、歩く度に地中にセンサーが刺さるので、まさに一石二鳥というわけだ。
Spacebitのビジネスモデル
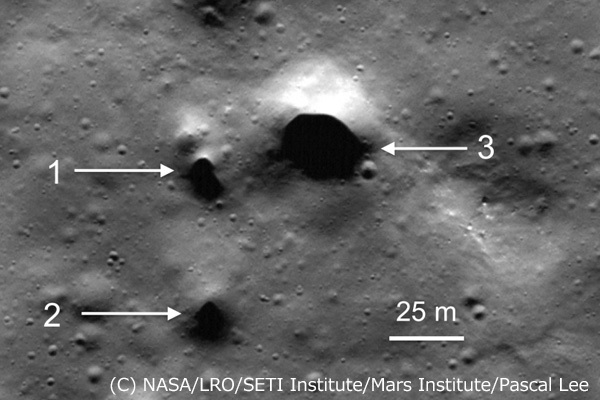
2021年に打ち上げるAsagumoの1号機は、月面における技術実証という位置づけであり、縦孔から降りて溶岩チューブに入れる可能性はかなり低いだろうが、同社がビジネスとして狙うのは、この溶岩チューブの探査だ。溶岩チューブは、月面の有人拠点として有力な候補。内部の3D形状など、データの販売を計画しているそうだ。
-
月面の縦孔の奥は、溶岩チューブが繋がっていると予測されている

そのため、2回目、3回目と、継続して探査を実施していく。まず2回目は、2023年に計画。母船となる車輪型ローバーを開発し、4台のAsagumoを搭載する。この母船ローバーは、Asagumoを夜の低温から守る機能もあるという。そして3回目は2024年に実施する予定で、Asagumoによる溶岩チューブ内の群探査を行う。
-
母船の車輪型ローバー。内部にAsagumoを格納して運ぶことができる
-
安価な超小型ローバーなので、チャレンジングな群探査が可能になる


同時に、ランダーの開発も進めるという。ランダーの重量は1トン程度を想定。着陸後に、3回ホップできる機能を搭載、複数の離れた地点に母船ローバーを降ろし、探査することを考えているそうだ。このランダーについては、ウクライナのYuzhnoyeと共同開発する予定とのこと。
-
写真のランダーは、サブスケールの模型。実際は1トン級になる

1号機の費用は、打ち上げ込みで300~500万ドル程度。月面探査としては安いとは言え、それなりの金額になってしまうが、Tanasyuk氏のポケットマネーで賄っているという。Tanasyuk氏は、創業したMoneXyという企業を売却して、子供の頃の夢を叶えるべく、Spacebitを立ち上げた。まるでElon Musk氏ばりのストーリーである。
月面では仲良くお互いを撮影
同日、AsagumoとYAOKIの協力についても発表があった。内容は、技術面での協力と、ミッション上の協力の2点。
-
Peregrineに相乗りする両機。左の「YAOKI」は、2輪型のローバーとなる

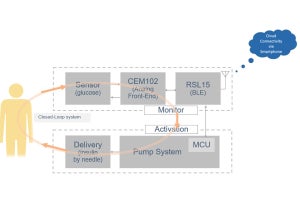
まず技術面では、月面での通信で協力する。両機はともに、ランダー経由で地球と通信を行うが、今回はランダー自体も初飛行のため、何が起きるか分からない。しかし通信は最重要事項である。通信できなければ、ローバーを動かせないし、データを得ることもできない。ランダーとの通信は、ローバーにとって、まさに命綱なのだ。
YAOKIを開発しているダイモンの中島紳一郎社長によれば、何らかの問題でランダーとローバーの間で通信できなくなったとき、ランダー側の通信機を融通し合って、成功率を高めることを考えているという。またお互いのローバーを中継器として、通信距離を延ばすことが可能かどうかも検討していくそうだ。
そしてミッション上の協力は、月面でお互いの撮影を行うことだ。両機はそれぞれカメラを搭載するが、当たり前ながら、自分自身を撮影することはできない。しかし2台のローバーが協力して撮影し合えば、月面での勇姿を見ることができる。これはプロモーション的にも、両者はぜひやっておきたいところだろう。
-
Spacebitファウンダー/CEOのPavlo Tanasyuk氏(右)と、ダイモンの中島紳一郎社長(左)

月面での日英協力が実現するのか。2021年は、月面探査の新しい時代の幕開けとなるかもしれない。